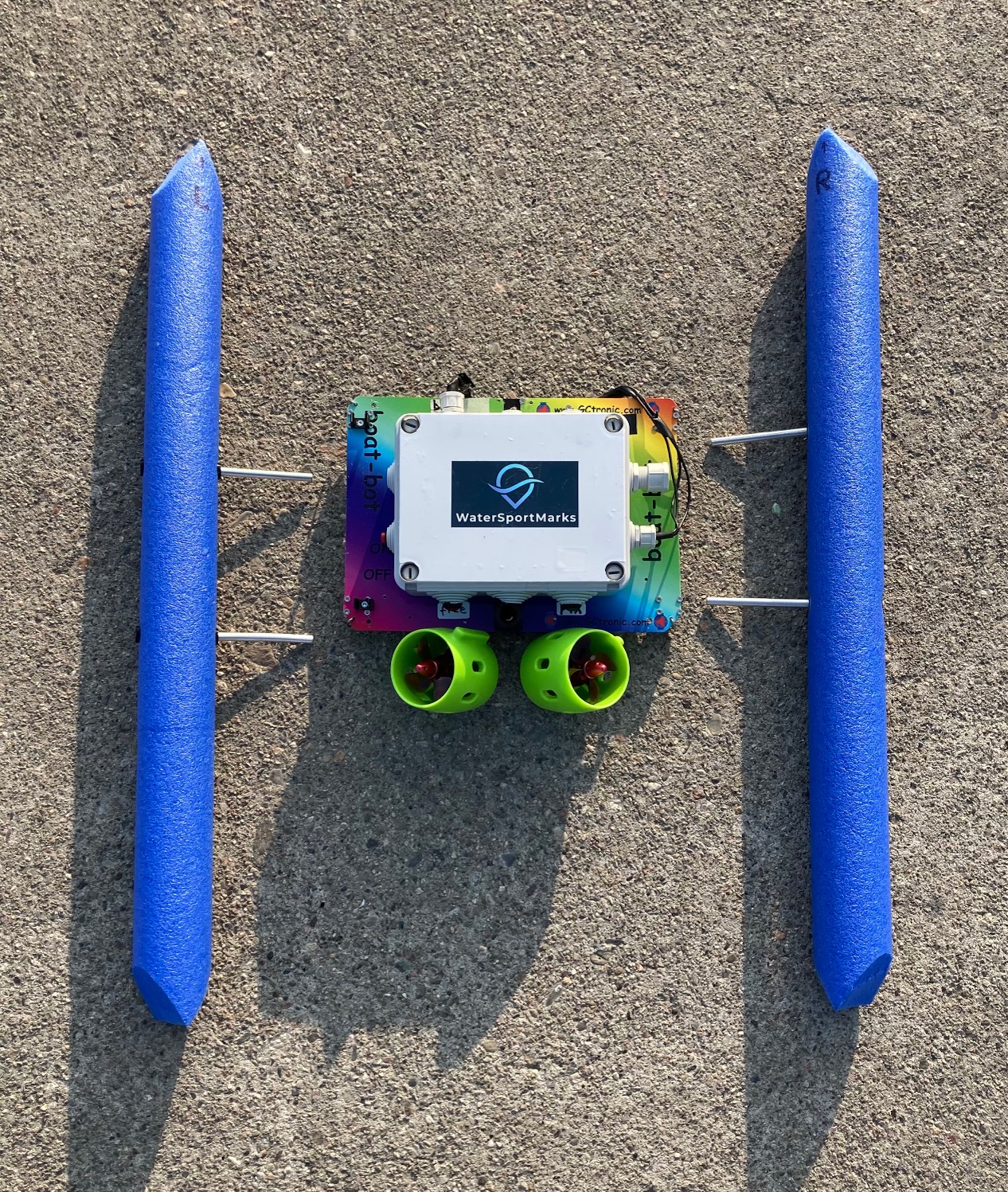
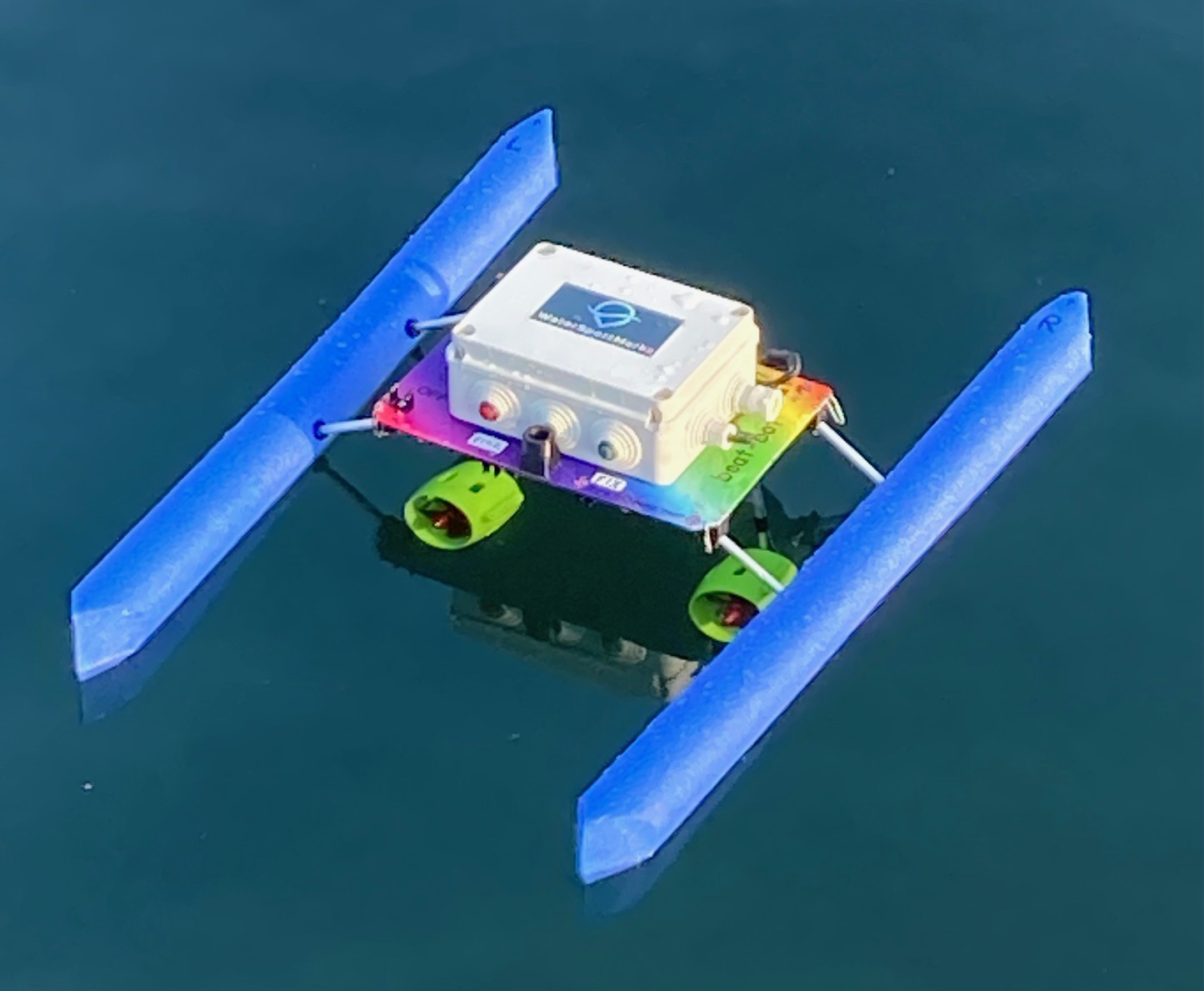
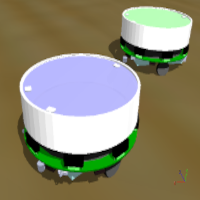
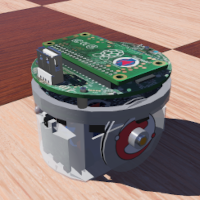
This small boat robot is a compact platform for research and education on the water. It has a modern and open architecture with all the components to make your own autonomous boat.
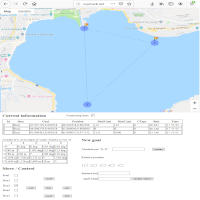
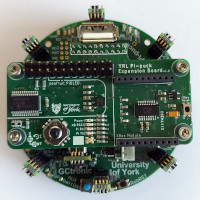
The control core is a Raspberry Pi interfacing GPS, IMU, motors and more. Easy remote connection with WiFi and BLE. Raspbian operating system based on Debian suitable for development.
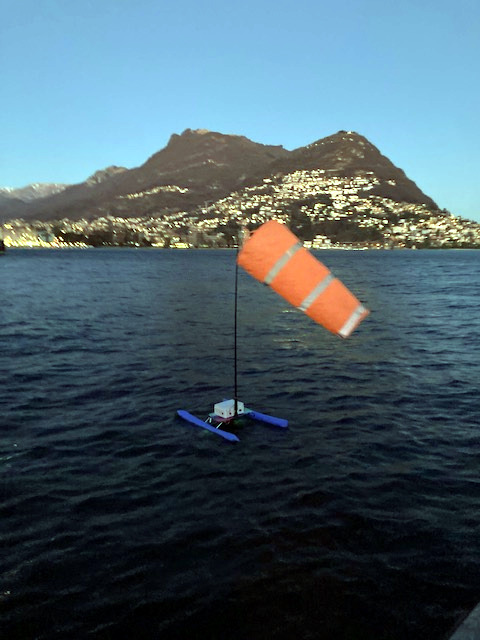
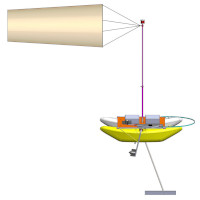
You can use the boat-bot for many applications, for instance as a training field buoy, to accomplish measurements on the water, as a smart surface marker buoy, ...and many other water related activities.