|
Feature |
Technical information |
|
Size, weight |
70 mm diameter, 55 mm height, 150 g |
|
Battery, autonomy |
5Wh LiION rechargeable and removable battery. About 3 hours autonomy |
|
Processor |
dsPIC 30F6014A @ 60MHz (~ 15 MIPS) |
|
Memory |
RAM: 8 KB; Flash: 144 KB |
|
Motors |
2 stepper motors with a 50:1 reduction gear, resolution 0.13 mm |
|
Speed |
Max: 15 cm/s |
|
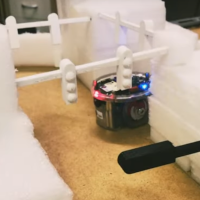
Mechanical structure |
Transparent plastic body supporting PCBs, battery and motors |
|
IR sensors |
8 infra-red sensors measuring ambient light and proximity of objects up to 6 cm |
|
Camera |
VGA color camera with resolution of 640x480 (typical use: 52x39 or 480x1) |
|
Microphones |
3 omni-directional microphones for sound localization |
|
Accelerometer |
3D accelerometer along the X, Y and Z |
|
LEDs |
8 red LEDs on the ring, green LEDs in the body, 1 strong red LED in front |
|
Speaker |
On-board speaker capable of playing WAV or tone sounds. |
|
Switch |
16 position rotating switch |
|
Communication |
Standard
Serial
Port
(up to 115kbps), |
|
Bluetooth |
Bluetooth for robot-computer and robot-robot wireless communication |
|
Remote Control |
Infra-red receiver for standard remote control commands |
|
Expansion bus |
Large expansion bus to add new possibilities to your robot |
|
Programming |
C programming with the GNU GCC compiler system, free compiler and IDE (integrated development environment) |
|
Simulation |
Webots facilitates the programming of e-puck with a powerful simulation, remote control and cross-compilation system |