|
Motivation |
- Design as cheap and small as possible an intelligent mobile robot
- Study collective behavior with large quantity of robots
- Acquire knowledge in highly integrated intelligent system
- Provide an HW platform for further research
|
System Description |
- 2 SWATCH motors with wheels and tires
- Microcontroller PIC16LF877 with 8Kwords Flash program memory
- Plastic frame and flex print with all the elecronic components
- 4 active IR proximity sensors (reflection measurement)
- NiMH rechargeable battery
- Receiver for remote control
- 24 pin connector for extension, voltage regulator and power switch
Extension modules
- Linear camera 102 pixels
- bidirectional radio communication
- tactile sensors
- gripper
- solar panel
|
Projects and applications |
|
Advantages |
- Small size
- Long power autonomy
- Soft- and hardware flexibility
- Simple, inexpensive and nice
|
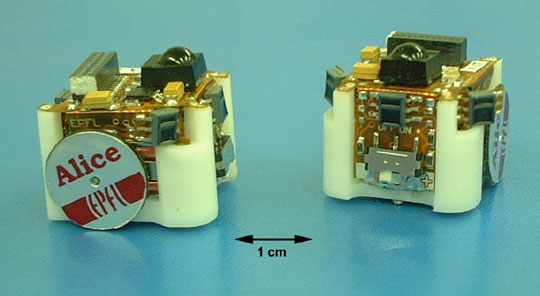
Specifications |
| Dimensions |
22mm x 21mm x 20mm |
| Velocity |
40 mm/s |
| Power consumption |
12 - 17 mW |
| Communication |
local IR 6 cm, IR & radio 10 m |
| Power autonomy |
up to 10 hours |
|
History |
- Different version from 1999 to 2002
- Version 2002 produced in 200 exemplars
- Still in use in several projects
|