Ultra Wide Band Extension: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
|||
| Line 4: | Line 4: | ||
On the nRF52832 the firmware is developed using the C API based on the PANS stack released by Decawave. The communication with the Elisa-3 robot is accomplished through I2C (the robot is the slave). The nRF52 is programmed/debugged through the SWD interface using an external nRF dev kit attached to the computer via USB. An additional UART is attached to the UWB module in order to get logging info. | On the nRF52832 the firmware is developed using the C API based on the PANS stack released by Decawave. The communication with the Elisa-3 robot is accomplished through I2C (the robot is the slave). The nRF52 is programmed/debugged through the SWD interface using an external nRF dev kit attached to the computer via USB. An additional UART is attached to the UWB module in order to get logging info. | ||
=I2C protocol= | |||
The nRF52 (master) writes all the actuators at once and read all the sensors data at once.<br/> | |||
<span class="plainlinks">[http://projects.gctronic.com/elisa3/uwb/protocol-elisa-to-nrf52.jpg <img width=600 src="http://projects.gctronic.com/elisa3/uwb/protocol-elisa-to-nrf52.jpg">]</span><br/> | |||
<span class="plainlinks">[http://projects.gctronic.com/elisa3/uwb/protocol-nrf52-to-elisa.jpg <img width=600 src="http://projects.gctronic.com/elisa3/uwb/protocol-nrf52-to-elisa.jpg">]</span><br/> | |||
=Source code= | =Source code= | ||
Revision as of 07:40, 26 May 2021
1 Introduction
The following figure shows the architecture details during the development phase:
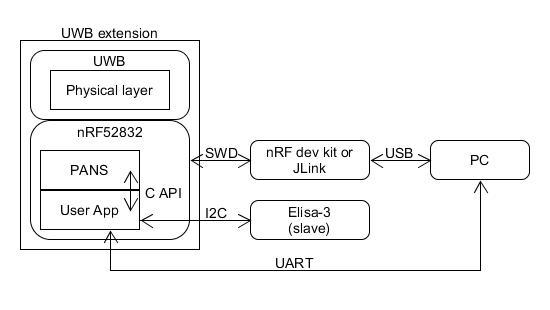
On the nRF52832 the firmware is developed using the C API based on the PANS stack released by Decawave. The communication with the Elisa-3 robot is accomplished through I2C (the robot is the slave). The nRF52 is programmed/debugged through the SWD interface using an external nRF dev kit attached to the computer via USB. An additional UART is attached to the UWB module in order to get logging info.
2 I2C protocol
The nRF52 (master) writes all the actuators at once and read all the sensors data at once.


3 Source code
Based on dwm-simple example from the package...
Embedded Segger (as explained in)