Micropython API reference: Difference between revisions
| Line 246: | Line 246: | ||
== <code>epuck2.get_all_sensors()</code> == | == <code>epuck2.get_all_sensors()</code> == | ||
Get all sensors values at once. Returns a list of 49 elements: | Get all sensors values at once. Returns a list of 49 elements: | ||
<math>\sqrt{2}</math> | |||
{| class="wikitable" | {| class="wikitable" | ||
! Idx !! Name !! Description | ! Idx !! Name !! Description | ||
Revision as of 09:32, 27 November 2025
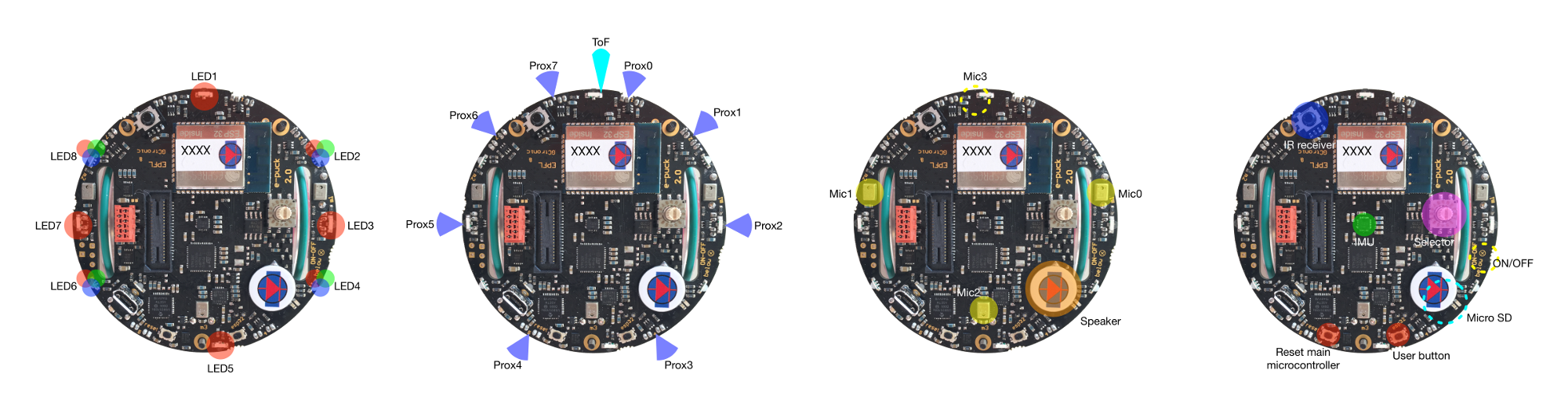
The following figures show the main components offered by the e-puck2 robot and where they are physically placed:
1 Functions Summary
| Method | Parameters | Description | Returns |
|---|---|---|---|
epuck2.get_api_version()
|
None | Returns the current e-puck2 API version. | str
|
epuck2.set_rgb()
|
led, r, g, b
|
Set a single RGB LED (LED 2, 4, 6, or 8). | None
|
epuck2.set_all_rgb()
|
r2, g2, b2 ... r8, g8, b8
|
Set all four RGB LEDs at once (12 params). | None
|
epuck2.set_leds()
|
bitmask: int
|
Set the standard Red LEDs using a bitmask. | None
|
epuck2.play_sound()
|
sound_id: int
|
Play an onboard sound effect. | None
|
epuck2.set_motors_speed()
|
left, right
|
Set motor speeds (-1000 to 1000). | None
|
epuck2.set_all_actuators()
|
list
|
Set all actuators (motors, LEDs, sound) at once. | None
|
epuck2.get_proximity()
|
None | Get values from the 8 IR proximity sensors. | list[8]
|
epuck2.get_distance()
|
None | Get ToF distance in mm. | int
|
epuck2.get_mic_volume()
|
None | Get volume from the 4 microphones. | list[4]
|
epuck2.get_acc_raw()
|
None | Get accelerometer raw axes (X, Y, Z). | list[3]
|
epuck2.get_gyro_raw()
|
None | Get gyroscope raw axes (X, Y, Z). | list[3]
|
epuck2.get_battery()
|
None | Get raw battery level. | int
|
epuck2.get_selector()
|
None | Get rotary selector position (0-15). | int
|
epuck2.button_pressed()
|
None | Get user button state. | bool
|
epuck2.sd_available()
|
None | Check if Micro SD card is present. | bool
|
epuck2.get_tv_remote()
|
None | Get IR remote data (RC5). | int
|
epuck2.get_all_sensors()
|
None | Get all sensor data in one call. | list[49]
|
2 General System
2.1 epuck2.get_api_version()
Returns the API version as a string (e.g., "XX.XX").
import epuck2
print(epuck2.get_api_version())2.2 epuck2.get_battery()
Get the raw battery voltage value.
Returns: Integer representing the raw battery level.
2.3 epuck2.get_selector()
Get the position of the physical rotary selector switch on top of the robot.
Returns: Integer between 0 and 15.
2.4 epuck2.button_pressed()
Check the state of the user button.
Returns: True if pressed, False otherwise.
2.5 epuck2.sd_available()
Check if a Micro SD card is inserted and mountable.
Returns: True if available, False otherwise.
3 Actuators (Motors, LEDs, Sound)
3.1 epuck2.set_motors_speed(left, right)
Set the speed of the left and right motors.
Parameters:
left(int): Speed of left motor (-1000 to 1000).right(int): Speed of right motor (-1000 to 1000).
import epuck2
epuck2.set_motors_speed(500, -500) # Spin in place3.2 epuck2.set_leds(value)
Set the state (on, off) of the standard red LEDs using a bitmask integer.
Parameters:
value(int):- Bit 0: LED 1
- Bit 1: LED 3
- Bit 2: LED 5
- Bit 3: LED 7
- Bit 4: Body LED
- Bit 5: Front LED
# Turn on LED 1 (1) and Front LED (32) -> 1 + 32 = 33 (0x21)
epuck2.set_leds(33)3.3 epuck2.set_rgb(led, red, green, blue)
Set the intensity of a specific RGB LED.
Parameters:
led(int): 0=LED2, 1=LED4, 2=LED6, 3=LED8.red, green, blue(int): Intensity 0-100.
# Set LED 2 (Index 0) to half-intensity blue
import epuck2
epuck2.set_rgb(0, 0, 0, 50)3.4 epuck2.set_all_rgb(r2, g2, b2, ... r8, g8, b8)
Set all four RGB LEDs simultaneously.
Parameters: 12 integers (0-100) representing R, G, B for LED 2, 4, 6, and 8 respectively.
# Set LED 2 to Red (100, 0, 0) and LED 4 to Green (0, 100, 0). Other LEDs are off.
import epuck2
epuck2.set_all_rgb(100, 0, 0, # LED 2
0, 100, 0, # LED 4
0, 0, 0, # LED 6
0, 0, 0) # LED 83.5 epuck2.play_sound(id)
Play onboard sound.
Parameters:
id(int):- 1: Mario
- 2: Underworld
- 4: Star Wars
- 8: 4KHz Tone
- 16: 10KHz Tone
- 32: Stop Sound
4 Sensors
4.1 epuck2.get_proximity()
Get the proximity sensor values. Higher value = closer object.
Returns: List of 8 integers (Prox0 to Prox7).
import epuck2
prox_values = epuck2.get_proximity()
# prox_values[0] is sensor Prox0, prox_values[7] is sensor Prox7
print(prox_values)4.2 epuck2.get_distance()
Get distance from the front Time of Flight (ToF) sensor.
Returns: Integer in millimeters (0 to 2000).
4.3 epuck2.get_mic_volume()
Get microphone volume levels [0..4095].
Returns: List of 4 integers: [Mic0 (right), Mic1 (left), Mic2 (back), Mic3 (front)].
4.4 epuck2.get_acc_raw()
Get raw accelerometer values (±2g).
Returns: List of 3 integers: [X, Y, Z]. Range [-1500..1500].
4.5 epuck2.get_gyro_raw()
Get raw gyroscope values (±250dps).
Returns: List of 3 integers: [X, Y, Z]. Range [-32768..32767].
4.6 epuck2.get_tv_remote()
Get the TV remote data (RC5 protocol).
Returns: Integer data field.
5 Advanced bulk functions
5.1 epuck2.set_all_actuators(args...)
Set all actuators in one call. Requires 17 arguments.
Arg 0: Settings (Mic sensitivity, etc)Arg 1-2: Left Motor, Right MotorArg 3: Standard LEDs bitmaskArg 4-15: RGB LEDs (R,G,B for LED 2,4,6,8)Arg 16: Sound ID
5.2 epuck2.get_all_sensors()
Get all sensors values at once. Returns a list of 49 elements: <math>\sqrt{2}</math>
| Idx | Name | Description |
|---|---|---|
| 0-2 | Accel X, Y, Z | Raw values |
| 3 | Acceleration magnitude <math>\sqrt{(x^2 + y^2 + z^2)}</math> | Between 0.0 and about 2600.0 (~3.46 g) |
| 3-5 | Orientation | Acc Mag, Orientation, Inclination (Floats) |
| 6-8 | Gyro X, Y, Z | Raw values |
| 9-11 | Magnetometer | X, Y, Z (Floats, uT) |
| 12 | Temp | Celsius |
| 13-20 | Proximity | IR Sensors 0-7 |
| 21-28 | Ambient | Ambient Light 0-7 |
| 29 | Distance | ToF (mm) |
| 30-33 | Mics | Volume 0-3 |
| 34-35 | Steps | Left, Right Motor steps |
| 36 | Battery | Raw value |
| 37 | Micro SD | State (1=OK) |
| 38-40 | Remote | Toggle, Address, Data |
| 41 | Selector | Position 0-15 |
| 42-44 | Ground Prox | Sensors 0-2 |
| 45-47 | Ground Amb | Ambient 0-2 |
| 48 | Button | 1=Pressed |