epuck2.get_proximity()
|
None
|
Get the values from the 8 proximity sensors. Higher values indicate a closer object.
|
list (of 8 integers)
2 Functions list
epuck2 Module Functions
| Method |
Parameters |
Description |
Returns
|
epuck2.get_api_version()
|
None
|
Returns the current e-puck2 API version as a string.
|
str
|
epuck2.set_rgb()
|
led: int, red: int, green: int, blue: int
|
Set the intensity of a single RGB LED. Intensity ranges between 0 (off) and 100 (full on).
|
None
|
epuck2.set_all_rgb()
|
red2..blue8: int (12 arguments total)
|
Set the intensity for all four RGB LEDs (LED 2, 4, 6, 8) simultaneously. Intensity ranges between 0 and 100.
|
None
|
epuck2_set_leds()
|
led1,led3,led5,led7,body,front
|
Set the LEDs state (on, off).
|
None
|
epuck2.play_sound()
|
sound id
|
Play onboard sound.
|
None
|
epuck2.set_motors_speed()
|
left: int, right: int
|
Set the speed for the left and right motors.
|
None
|
epuck2.set_all_actuators()
|
actuators list (17 arguments total)
|
Set all actuators at once.
|
None
|
epuck2.get_proximity()
|
None
|
Get the values from the 8 proximity sensors. Higher values indicate a closer object.
|
list (of 8 integers)
|
epuck2.button_pressed()
|
None
|
Get button state.
|
True if pressed
|
3 Various
3.1 epuck2.get_api_version()
Returns the API version as a string (e.g., "02.01").
import epuck2
version = epuck2.get_api_version()
print(version) # Example output: "XX.XX" 4 LEDs
4.1 epuck2.set_rgb(led, red, green, blue)
Set the intensity of one of the four RGB LEDs.
Parameters:
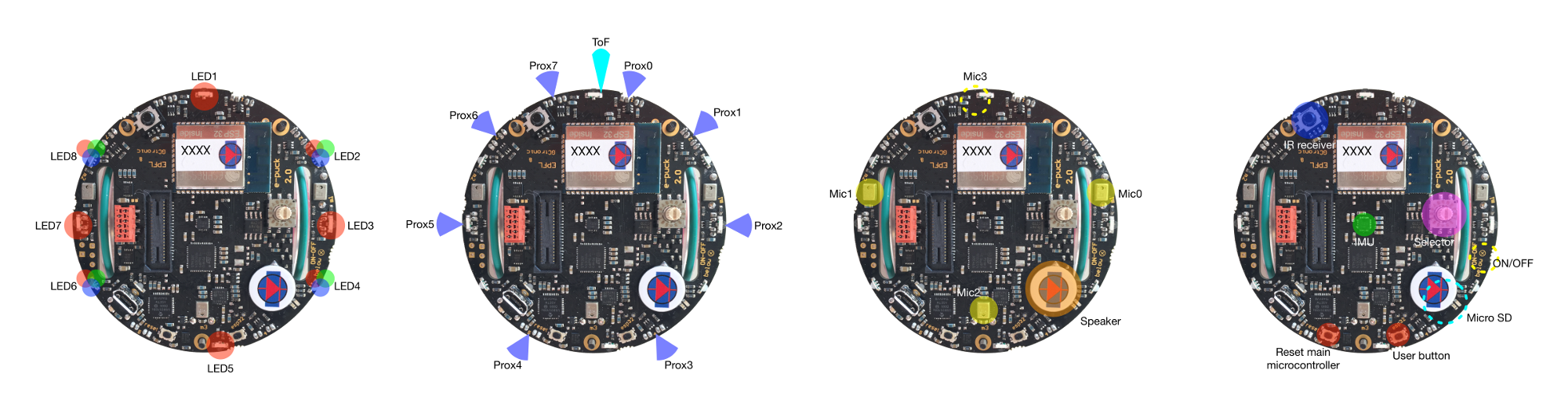
* led (int): The index of the LED to control:
* 0: LED 2 (Front Right)
* 1: LED 4 (Back Right)
* 2: LED 6 (Back Left)
* 3: LED 8 (Front Left)
* red, green, blue (int): Intensity from 0 (off) to 100 (full brightness).
Example:
# Set LED 1 (Index 0, LED 2) to half-intensity Blue
import epuck2
epuck2.set_rgb(0, 0, 0, 50) 4.2 epuck2.set_all_rgb(red2, green2, blue2, red4, green4, blue4, red6, green6, blue6, red8, green8, blue8)
Sets all four RGB LEDs simultaneously. The arguments are grouped in R, G, B for LEDs 2, 4, 6, and 8 in that order.
Parameters: 12 integers representing the R, G, B values for LED 2, LED 4, LED 6, and LED 8, respectively. All values are in the range 0 to 100.
Example:
# Set LED 2 to Red (100, 0, 0) and LED 4 to Green (0, 100, 0). Other LEDs are off.
import epuck2
epuck2.set_all_rgb(100, 0, 0, # LED 2
0, 100, 0, # LED 4
0, 0, 0, # LED 6
0, 0, 0) # LED 85 Proximity sensors
5.1 epuck2.get_proximity()
Retrieves the proximity sensor readings.
Returns: A list of 8 integers.
Example:
import epuck2
prox_values = epuck2.get_proximity()
# prox_values[0] is sensor S0, prox_values[7] is sensor S7
print(prox_values) 6 Motors
6.1 epuck2.set_motors_speed(left, right)
Set the speed of the left and right motors.
Parameters:
* left (int): Speed of the left motor. Range is **-1000** (reverse) to **1000** (forward).
* right (int): Speed of the right motor. Range is **-1000** (reverse) to **1000** (forward).
Example:
# Move forward at full speed
import epuck2
epuck2.set_motors_speed(1000, 1000)
# Turn right in place
import epuck2
epuck2.set_motors_speed(500, -500) |