Wheelphone-images and Wheelphone technical specifications: Difference between pages
(Difference between pages)
No edit summary |
No edit summary |
||
| Line 1: | Line 1: | ||
[{{fullurl:Wheelphone}} Wheelphone main wiki]<br/> | [{{fullurl:Wheelphone}} Wheelphone main wiki]<br/> | ||
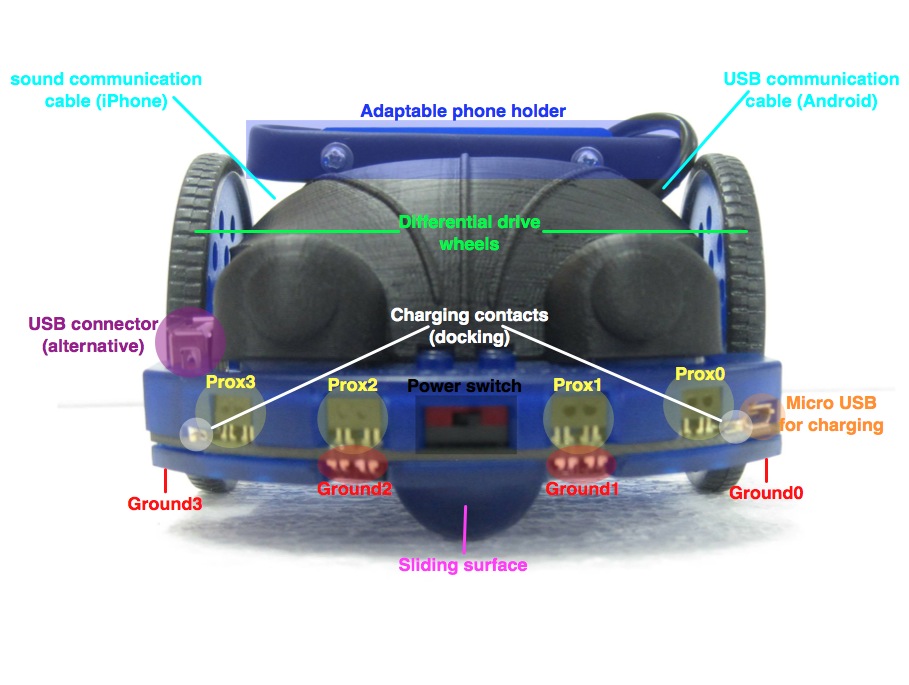
=Hardware= | |||
The following figure shows the main components of the Wheelphone robot and where they are physically placed:<br/> | |||
| | [https://www.gctronic.com/doc/images/wheelphone-schema.jpg <img width=400 src="https://www.gctronic.com/doc/images/wheelphone-schema-small.jpg">] | ||
| | |||
=Detailed features= | |||
{| border="1" | |||
|'''Feature''' | |||
|'''Technical information''' | |||
|- | |||
|Size, weight | |||
|92 mm width, 102 mm length, 68 mm height, 200 g | |||
|- | |- | ||
| | |Battery, autonomy | ||
|LiPo rechargeable battery (1600 mAh, 3.7 V). About 3.5 hours autonomy (motors running at middle speed continuously). Recharging time about 1h45 | |||
| | |||
|- | |- | ||
| | |2 options to charge | ||
| | |with a micro USB female connector in front of the robot, 500mA<br/>with 2 golden contacts in front and the relative docking station, 1000mA | ||
| | |- | ||
|Processor | |||
|Microchip PIC24FJ64GB004 @ 16MHz (8 MIPS); 16 bit microcontroller<br/>... and the one of the phone | |||
|- | |||
|Memory | |||
|RAM: 8 KB; Flash: 64 KB<br/>... and the one of the phone | |||
|- | |||
|Motors | |||
|2 DC motors with gear; speed controlled (forward direction) with backEMF | |||
|- | |||
|Speed | |||
|Max: 30 cm/s | |||
|- | |||
|Mechanical structure | |||
|Molded plastic case, adaptable phone holder | |||
|- | |||
|IR sensors | |||
|4 infra-red sensors measuring ambient light and proximity of objects up to 6 cm (placed on the front-side of the robot)<br/> 4 ground sensors detecting cliffs or color differences (placed on the bottom-front-side of the robot) | |||
|- | |||
|LEDs | |||
|1 red/green LED (charging/charged indicator) | |||
|- | |||
|Communication | |||
| Android: USB high speed; iPhone: sound cable. Both reaches 20 Hz sensor refresh | |||
|- | |||
|Additional connectors | |||
|1 USB connector (type A) as alternative to the micro USB cable | |||
|- | |||
|Programming | |||
|Android SDK, iOS SDK | |||
|} | |} | ||
Latest revision as of 12:35, 27 January 2023
Hardware
The following figure shows the main components of the Wheelphone robot and where they are physically placed:
Detailed features
| Feature | Technical information |
| Size, weight | 92 mm width, 102 mm length, 68 mm height, 200 g |
| Battery, autonomy | LiPo rechargeable battery (1600 mAh, 3.7 V). About 3.5 hours autonomy (motors running at middle speed continuously). Recharging time about 1h45 |
| 2 options to charge | with a micro USB female connector in front of the robot, 500mA with 2 golden contacts in front and the relative docking station, 1000mA |
| Processor | Microchip PIC24FJ64GB004 @ 16MHz (8 MIPS); 16 bit microcontroller ... and the one of the phone |
| Memory | RAM: 8 KB; Flash: 64 KB ... and the one of the phone |
| Motors | 2 DC motors with gear; speed controlled (forward direction) with backEMF |
| Speed | Max: 30 cm/s |
| Mechanical structure | Molded plastic case, adaptable phone holder |
| IR sensors | 4 infra-red sensors measuring ambient light and proximity of objects up to 6 cm (placed on the front-side of the robot) 4 ground sensors detecting cliffs or color differences (placed on the bottom-front-side of the robot) |
| LEDs | 1 red/green LED (charging/charged indicator) |
| Communication | Android: USB high speed; iPhone: sound cable. Both reaches 20 Hz sensor refresh |
| Additional connectors | 1 USB connector (type A) as alternative to the micro USB cable |
| Programming | Android SDK, iOS SDK |