|
|
| Line 1: |
Line 1: |
| This is a mini how-to of the e-puck extension board for the Gumstix Overo COM.
| | =Hardware= |
| | | ==Overview== |
| =Minimal getting started= | | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck-overview.jpg <img width=600 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck-overview-small.jpg">]</span><br/> |
| {| style="color:black; background-color:#ffffcc;" cellspacing="0" border="1"
| | Features: |
| |
| | * Raspberry Pi zero W (rPi) connected to the robot via I2C |
| # upload the [http://www.gctronic.com/doc/index.php/E-Puck#Standard_firmware standard firmware] to the e-puck robot and put selector in position 10
| | * interface between the robot base camera and the rPi via USB, up to 15 FPS |
| # connect the USB cable: mini-USB to the extension module and the other side to the PC
| | * 1 digital microphone and 1 speaker |
| # execute a terminal program (e.g. minicom) and configure the connection with 115200-8N1. The serial device path should be typically something like "/dev/ttyUSB0". Make sure that the flow control parameter of minicom called "Hardware" is set to "No".
| | * USB hub connected to the rPi with 2 free ports |
| # switch on the robot; now the terminal should display the Gumstix Overo booting information (booting time 25-30 seconds)
| | * uUSB cable to the rPi uart port. Also ok for charging |
| # login with user=root, password=root
| | * 2 chargers. 1 for the robot battery and 1 for the auxiliary battery on top of the extension |
| |}
| | * charging contact points in front for automatic charging. External docking station available |
| | * several extension options. 6 i2C channels, 2 ADC inputs |
| | * several LED to show the status of the rPi and the power/chargers |
|
| |
|
| <font style="color:red"> Anyway you're encouraged to read all the documentation since you'll find more detailed explanations. </font> | | ==I2C bus== |
| | I2C is used to let communicate various elements present in the robot, Pi-puck and extensions. An overall schema is shown in the following figure:<br/> |
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/i2c-buses.png <img width=600 src="https://projects.gctronic.com/epuck2/wiki_images/i2c-buses.png">]</span><br/> |
| | An I2C switcher is included in the Pi-puck extension in order to support additional I2C buses (the RPi alone has only one usable I2C bus). These are needed to avoid conflicts between Time-of-Flight sensors that have a fixed I2C address. |
|
| |
|
| =Introduction= | | =Getting started= |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/Ext+robot1.jpg <img width=200 src="http://www.gctronic.com/doc/images/Ext+robot1.jpg">]</span> <br/>
| | This introductory section explains the minimal procedures needed to work with the Raspberry Pi Zero W mounted on the Pi-puck extension board and gives a general overview of the available basic demos and scripts shipped with the system flashed on the micro SD. More advanced demos are described in the following separate sections (e.g. ROS), but the steps documented here are fundamental, so be sure to fully understand them. <br/> |
| This introductory section explains the minimal procedures needed to work with the Gumstix Overo computer-on-module (COM) mounted on the e-puck extension board and gives a general overview of the available demos and scripts shipped with the micro sd. You can also refer to [https://projects.gctronic.com/Gumstix/extension-instructions.pdf extension-instructions] that is a document containing the most important information in order to start working with the extension. The extension is mostly an interface between the e-puck robot and the Gumstix Overo COM. | |
|
| |
|
| Gumstix Overo COM: [http://www.gumstix.com product information] and [http://www.gumstix.org programming information],
| | The extension is mostly an interface between the e-puck robot and the Raspberry Pi, so you can exploit the computational power of a Linux machine to extend the robot capabilities.<br/> |
|
| |
|
| ==Full package==
| | In most cases, the Pi-puck extension will be attached to the robot, but it's interesting to note that it can be used also alone when the interaction with the robot isn't required.<br/> |
| The full package content is:
| | The following sections assume the full configuration (robot + extension), unless otherwise stated. |
| * e-puck extension with Gumstix Overo COM and micro sd card already inserted
| |
| * USB adapter for the micro sd
| |
| * A to mini-B USB cable
| |
| * USB wifi dongle
| |
| * external power adapter
| |
| * USB host adapter
| |
| The standard COM mounted on the e-puck extension is the Gumstix Overo EarthSTORM COM. Some extensions were delivered with the Gumstix Overo SandSTORM COM, don't worry, the main difference between the two COMs is that the SandSTORM has no flash memory, but the flash isn't necessary since the system is booted from the micro sd.
| |
|
| |
|
| ==Requirements== | | ==Requirements== |
| In order to connect to the extension through the mini USB the FTDI driver need to be installed. If a serial port is automatically created when connecting the robot to the computer you're done otherwise visit the following site and download the drivers for your architecture (32 or 64 bits) [http://www.ftdichip.com/Drivers/VCP.htm FTDI drivers].
| | The robot must be programmed with a special firmware in order to communicate via I2C bus with the Raspberry Pi mounted on the Pi-puck extension. The same I2C bus is shared by all the devices (camera, IMU, distance sensor, others extensions), the main microcontroller and the Raspberry Pi. Since the Raspberry Pi acts as I2C master, these devices will not be anymore reachable directly from the robot main microcontroller that will act instead as I2C slave. |
| | |
| ==General procedure==
| |
| The e-puck extension board for the Gumstix Overo COM comes with a pre-configured system ready to run without any additional configuration. The whole system is installed on a micro sd and is composed of:
| |
| * U-Boot (bootloader customized for the hardware)
| |
| <!--* OMAP35x Linux PSP [https://www-a.ti.com/downloads/sds_support/targetcontent/psp/omap35x/index.html https://www-a.ti.com/downloads/sds_support/targetcontent/psp/omap35x/index.html] (linux kernel) -->
| |
| * OMAP35x Linux TI-PSP [http://arago-project.org/git/people/?p=sriram/ti-psp-omap.git;a=summary http://arago-project.org/git/people/?p=sriram/ti-psp-omap.git;a=summary] (linux kernel)
| |
| * some demos and useful scripts in the /home/root directory
| |
| It's important to note that the flash isn't reprogrammed, so it will contain the factory system.
| |
| | |
| In order to access the system from a PC (console mode), the following steps must be performed:
| |
| # connect the USB cable: mini-USB to the extension module and the other side to the PC
| |
| # execute a terminal program (e.g. minicom) and configure the connection with 115200-8N1. The serial device path should be typically something like "/dev/ttyUSB0". Make sure that the flow control parameter of minicom called "Hardware" is set to "No".
| |
| # switch on the robot; now the terminal should display the Gumstix Overo booting information (booting time 25-30 seconds)
| |
| # login with user=root, password=root
| |
| | |
| ==Wireless setup==
| |
| Before proceding with the following configurations be sure that the WiFi dongle is well recognized, refer to section [http://www.gctronic.com/doc/index.php/Overo_Extension#WiFi_dongle WiFi_dongle].
| |
| ===Wireless configuration using a script===
| |
| The script ''setupWifi'' placed under /home/root/scripts is used to configure easily the wireless network (managed mode) and need to be adapted to your specific situation. The script is shown below:
| |
| <pre>
| |
| #!/bin/bash
| |
| ifconfig wlan0 up
| |
| iwconfig wlan0 essid SSID key HEX_KEY
| |
| iwconfig wlan0 ap MAC_ADDRESS
| |
| iwconfig wlan0 rate 54M
| |
| ifconfig wlan0 LOCAL_IP netmask SUBNET_MASK
| |
| route add default gw GATEWAY_IP
| |
| </pre>
| |
| To know the available wifi networks and related information such as mac address of the access point, you can issue the command ''iwlist scanning wlan0''.
| |
| | |
| On some platforms, udev may rename the network interface ''wlan0.'' In this event, the 'setupWifi' script will return several errors, some of which will say "No Such Device." To identify your network interfaces, use the commands ''ifconfig'' or ''iwconfig.'' These will provide a listing of your devices, and their current states. Identify the appropriate interface (typically ''wlan#'' where "#" is a number) and replace ''wlan0'' in the above script with this.
| |
| | |
| If you're using dhcp, you can instead adapt the script ''setupWifiDhcp'' found under /home/root/scripts:
| |
| <pre>
| |
| #!/bin/bash
| |
| ifconfig wlan0 up
| |
| iwconfig wlan0 essid SSID key HEX_KEY
| |
| iwconfig wlan0 ap MAC_ADDRESS
| |
| iwconfig wlan0 rate 54M
| |
| dhclient wlan0
| |
| </pre>
| |
| | |
| The parameters that must be customized are shown in capitals; after that you can execute the script typing ''./setupWifi'' (or ''./setupWifiDhcp'') and after a while a message should be displayed indicating that the wireless is ready. You can test the network configuration using ''ping''.
| |
| | |
| It may be necessary to create a directory if you get the error "can't create /var/lib/dhcp/dhclient.leases: No such file or directory." Use the ''mkdir'' command
| |
| | |
| <pre>
| |
| mkdir /var/lib/dhcp
| |
| </pre>
| |
| | |
| Usually, when the Wifi dongle is connected to the AP, a message is written in the message buffer of the kernel. The following bash code snippet can be used to make sure that the connection is well established when the program returns:
| |
| <pre>
| |
| #!/bin/bash
| |
| echo Wait until the Wifi is connected to the AP
| |
| while true
| |
| do
| |
| #the text "link becomes ready" can vary according the Wifi dongle
| |
| a=$(dmesg | grep wlan0 | grep "link becomes ready")
| |
| if [ -n "$a" ]
| |
| then
| |
| echo Wifi enabled!
| |
| exit
| |
| fi
| |
| sleep 1
| |
| done
| |
| </pre>
| |
| | |
| In order for the ''setupWifi'' or ''setupWifiDhcp'' scripts to be run during boot, copy the appropriate script into the ''init.d'' directory with the other start/stop scripts.
| |
| <pre>
| |
| cp -i ~/scripts/setupWifi /etc/init.d/setupWifi
| |
| </pre>
| |
| Then determine which run level the system is using with the command:
| |
| <pre>
| |
| runlevel
| |
| </pre>
| |
| This should return "N #" where # is the run level number. Create a link to your script in the ''init.d'' directory within the directory ''/etc/rc#.d'' Name the link ''S##setupWifi.'' The number ## (customarily 2 digits, which you choose) determines where in the startup sequence your script will be run. It is good advice to choose a number just smaller than the largest in the ''rc#.d'' directory, this way the script is not called before lower-level ones. The creation of this link can be done with the following command (where # and ## must be changed to their appropriate values).
| |
| <pre>
| |
| ln -i -s /etc/init.d/setupWifi /etc/rc#.d/S##setupWifi
| |
| </pre>
| |
| | |
| ===Wireless configuration using a wpa_supplicant===
| |
| Alternativerly, the Wifi connection can be set up by using both [http://hostap.epitest.fi/wpa_supplicant/ wpa_supplicant] and the native wifi setup. This has the advantage to be more robust against failure. In order to do that, the Wifi interface can be added to /etc/network/interfaces, this way:
| |
| <pre>
| |
| auto wlan0
| |
| iface wlan0 inet static
| |
| address 192.168.1.2
| |
| netmask 255.255.255.0
| |
| wpa-conf /path/to/wifi.conf #this should be replaced by the absolute location of wifi.conf
| |
| </pre>
| |
| | |
| And the related wifi.conf
| |
| <pre>
| |
| ctrl_interface=/var/run/wpa_supplicant
| |
| ctrl_interface_group=0
| |
| ap_scan=1
| |
| network={
| |
| ssid="myssid" #this should be replaced by your ssid
| |
| scan_ssid=1
| |
| key_mgmt=NONE
| |
| wep_key0=1234567890 #this should be replaced by your WEP key
| |
| wep_tx_keyidx=0
| |
| }
| |
| </pre>
| |
| | |
| In this example, static IPs and WEP encryption have been used. DHCP and other encryption can be obviously used by following the documentation both of the linux native network setup and of [http://hostap.epitest.fi/wpa_supplicant/ wpa_supplicant].
| |
| | |
| ===Network performance===
| |
| To test the network performance you could use the ''iperf'' tool installed on the system. In the server side you must issue the following command (either for TCP or UDP testing), after which the server machine is listening for incoming data:
| |
| <pre>
| |
| iperf -s [TCP]
| |
| iperf -s -u [UDP]
| |
| </pre>
| |
| In the client side you must type:
| |
| <pre>
| |
| iperf -c SERVER-IP [TCP]
| |
| iperf -c SERBER-IP -u -b 50000000 [UDP]
| |
| </pre>
| |
| Where ''SERVER-IP'' must be changed accordingly to the network configuration.
| |
| | |
| ==Package manager==
| |
| If you have an internet connection up and running you can update and install easily new packages with ''opkg''. Some of the useful operations you could do are:
| |
| * update repositories: <code>opkg update</code>
| |
| * update installed packages and kernel; pay attention that the camera driver is based on the provided kernel and upgrading it will prevent the use of the camera: <code>opkg upgrade</code>
| |
| * list of software currently installed on the machine: <code>opkg list_installed</code>
| |
| * install a new package (perl in the example): <code>opkg install perl</code>
| |
| * remove a pacakge (perl in the example): <code>opkg remove perl</code>
| |
| * list of all packages available to be installed: <code>opkg list</code>
| |
| | |
| ===opkg update failed===
| |
| If you get errors on reaching the default repo sources you can try changing them by following these steps:
| |
| # make a copy of the current repo: <code>mv /etc/opkg/base-feed.conf /dest-dir</code>
| |
| # add the new repo: <code>echo 'src/gz base http://feeds.angstrom-distribution.org/feeds/unstable/ipk/glibc/armv7a/base' > /etc/opkg/base-feed.conf</code>
| |
| # opkg update
| |
| The procedure shows how to change the <code>base</code> repo, the same need to be done for all others repos.
| |
| | |
| ==USB ports==
| |
| The e-puck extension board for the Gumstix Overo COM comes with two USB interfaces called USB host and USB otg. If you try inserting devices that require more energy than the one permitted on the otg, the device will not be enabled automatically. In these cases you can use the three scripts ''usbup'', ''usbdown'' and ''usbenable'' to respectively power up, power down and enable the USB device; they're placed under /home/root/scripts. These scripts are intended for primary use with the USB otg port, even if they're suitable for both ports (otg and host).
| |
| * ''./usbup otg'' (or ''./usbup host''): power on the usb device
| |
| * ''./usbdown otg'' (or ''./usbdown host''): power off the usb device
| |
| * ''./usbenable otg'' (or ''./usbenable host''): activate the usb device (now is in the usb device list)
| |
| | |
| ==Demos==
| |
| A specific firmware must be charged on the e-puck to run the Gumstix Overo linked demos, refer to section [http://www.gctronic.com/doc/index.php/Overo_Extension#E-puck_firmware E-puck firmware].
| |
| | |
| ===Serial test on the Gumstix Overo COM===
| |
| This small program read and write from a serial port (non-canonical mode). For more information on the usage refers to [http://docwiki.gumstix.org/index.php?title=Sample_code/C/Serial sertest] ([https://projects.gctronic.com/Gumstix/sertest.tar.gz sertest sources]). It's placed under /home/root/demos/gumstix-common, and it's called ''sertest''.
| |
| | |
| ===Advanced sercom===
| |
| Once the new firmware is running on the e-puck, the selector must be set in position 10 to run the advanced sercom for the Gumstix Overo. <br/>
| |
| Now you can type (after being in /home/root/demos/gumstix-common) ''./sertest -p /dev/ttyS0 -b 230400'' (or simply ''./ser+ENTER'') to enter the e-puck menu in console mode; for a list of all available commands type ''h+ENTER''. After stopping the sertest program (CTRL+C), the display may not respond correctly; to reset the display run the script ''r'' by simply typing ''./r+ENTER''. Now the display should behave normally.<br/>
| |
| For more information about the advanced sercom refer to the page [http://www.gctronic.com/doc/index.php/Advanced_sercom_protocol Advanced sercom protocol].
| |
| | |
| ===Images grabbing (camera driver)===
| |
| <!-- A small utility called ''v4l2grab'' was used for grabbing JPEGs from V4L2 devices ([http://github.com/twam/v4l2grab http://github.com/twam/v4l2grab]). <br/>
| |
| In order to get an image from the e-puck camera you need to follow these steps:
| |
| # load the driver typing (after being in /home/root/demos) ''insmod po6030cam.ko po6030_format=1''; a message should be displayed indicating that the camera is successfully detected
| |
| # run the program typing (after being in /home/root/demos) ''./v4l2grab -o image.jpg''
| |
| For more information on the options available refer to ''./v4l2grab -h''.
| |
| -->
| |
| A small application called ''v4l2grab'' ([https://projects.gctronic.com/Gumstix/v4l2grab-2buff-rev17-13.08.14.zip v4l2grab.zip]) based on [http://github.com/twam/v4l2grab http://github.com/twam/v4l2grab] was used for grabbing JPEGs from V4L2 devices. In order to get an image from the e-puck camera you need to run the program typing (after being in <code>/home/root/demos/gumstix-common/</code>) <code>./v4l2grab -o image.jpg</code>. The application communicates also with the robot through the serial line to know the camera orientation and rotates the image automatically in case the camera is rotated (refer to section [http://www.gctronic.com/doc/index.php/E-Puck#Camera e-puck camera] for more information on camera orientation).
| |
| For more information on the options available refer to the help by typing<code>./v4l2grab -h</code>.
| |
| | |
| ===Images transfer (camera driver)===
| |
| This demo is divided in two parts: one running on the e-puck extension board for the Gumstix Overo COM that continuously request images to the e-puck camera and transfers them over UDP, and the other running on a PC that acts as a server and is listening for the images visualizing them as soon as they are available. A network link must be established between the two in order to run this demo; for more information on how to configure the network refer to the section [http://www.gctronic.com/doc/index.php/Overo_Extension#Wireless_setup Wireless setup].
| |
| | |
| First of all you need to start the server ([https://projects.gctronic.com/Gumstix/Receiver.zip Receiver QT project]). The application is a Qt project, so the compilation may be handled easily with [https://wiki.qt.io/Category:Tools::QtCreator Qt Creator]; alternatively [http://doc.qt.io/qt-5/qmake-manual.html qmake] can be used. The usage is very simple: the server listening port and the protocol (only UDP available at the moment) must be selected first, then click on the button ''Connect''; at this moment the application is waiting images.<br/>
| |
| On the e-puck extension board side, you need to run the program typing (after being in /home/root/demos) ''./v4l2grab-send -o image.jpg -i SERVER_IP -p SERVER_PORT -f 0 -t 0''. ''SERVER_IP'' is the address of the PC and ''SERVER_PORT'' should be the same as configured when the receiver was started. The ''f'' option indicates the format (in this case RGB) and ''t'' indicates the transfer mode (0=UDP, 1=TCP).
| |
| <!--
| |
| On the e-puck extension board side, you need to follow these steps:
| |
| # load the driver typing (after being in /home/root/demos) ''insmod po6030cam.ko po6030_format=0''; a message should be displayed indicating that the camera is successfully detected
| |
| # run the program typing (after being in /home/root/demos) ''./v4l2grab-send -o image.jpg -i SERVER_IP -p SERVER_PORT -f 0 -t 0''. ''SERVER_IP'' is the address of the PC and ''SERVER_PORT'' should be the same as configured when the receiver was started. The ''f'' option indicates the format (in this case RGB) and ''t'' indicates the transfer mode (0=UDP, 1=TCP but still not available).
| |
| -->
| |
| For more information on the options available refer to ''./v4l2grab-send -h''. <br/>
| |
| The sources for the sender, that is an extension of the ''v4l2grab'' application, could be found in the following link [https://projects.gctronic.com/Gumstix/v4l2grab-send.zip v4l2grab-send.zip]; in order to compile the application the ''Makefile'' must be modified specifying the path to the cross-compiler (for more information on cross-compilation for the OMAP3530 processor refers to [http://focus.ti.com/docs/prod/folders/print/omap3503.html http://focus.ti.com/docs/prod/folders/print/omap3503.html]).
| |
| | |
| ===Music player===
| |
| This isn't really a demo, it's only one of the possible way on how to listen something from the extension module. The system comes with a tool called [http://www.mplayerhq.hu/ mplayer] that supports many multimedia formats. You can use it to play for example an mp3 file in this way:
| |
| <pre>
| |
| mplayer file.mp3
| |
| </pre>
| |
| You can then adjust the volume with either the ''alsamixer'' graphical tool (adjusting DAC2 control) or using the command line tool ''amixer''; the following command can be used for instance to set the volume to 80%:
| |
| <pre>
| |
| amixer set 'DAC2 Analog' 80%
| |
| </pre>
| |
| | |
| ==File transfer==
| |
| ===ssh===
| |
| The e-puck extension board for the Gumstix Overo COM supports ssh connections through dropbear (small SSH 2 server and client) that is installed on the system.<br/>
| |
| To exchange file between the module and the PC, the ''scp'' tool (secure copy) will be used; the general command is the following:
| |
| <pre>
| |
| scp user@ip:path-to-file file-name
| |
| </pre>
| |
| As an example of transfer a file from the PC to the extension, let the PC user be ''stefano'' and its IP be 192.168.1.10, then the command will be:
| |
| <pre>
| |
| scp stefano@192.168.1.10:/home/stefano/file-to-send prova
| |
| </pre>
| |
| The file ''file-to-send'' will be renamed in ''prova'' and placed in the current directory.
| |
| | |
| If you are working in Windows you can use [http://winscp.net WinSCP] to exchange data between the robot and the computer.
| |
| | |
| ===zmodem===
| |
| The following instructions to exchange data between the extension and the computer refer to ''minicom'' as the terminal.<br/>
| |
| If you want to receive a file, that is transfer a file from the PC to the e-puck extension board for the Gumstix Overo COM, you need to follow these steps:
| |
| # open a terminal window with minicom; now you access the linux system in console mode
| |
| # type ''lrz''
| |
| # press ''CTRL+A'' and then ''S''
| |
| # select ''zmodem'' and navigate to find the file you want to tranfer
| |
| # select the file with the ''SPACEBAR'' and then press ''ENTER'' to start the transfer
| |
| # when transfer is complete press ''ENTER'' once more to come back to the command line
| |
| For more information type ''lrz -h''.
| |
| | |
| If you want to send a file, that is transfer a file from the e-puck extension board to the PC, you need to follow these steps:
| |
| # open a terminal window with minicom; now you access the linux system in console mode
| |
| # type ''lsz file-name'', where ''file-name'' is the file you want to transfer
| |
| # when transfer is complete press ''ENTER'' to return to the command line
| |
| The file will be placed in the directory where minicom is started. For more information type ''lsz -h''.
| |
| | |
| ==Extension LEDs==
| |
| The e-puck extension board for the Gumstix Overo COM comprises 8 new small leds that can be turned on/off easily from the file system in this way:
| |
| <pre>
| |
| echo 1 > /sys/class/gpio/gpio7x/value [turn on]
| |
| echo 0 > /sys/class/gpio/gpio7x/value [turn off]
| |
| </pre>
| |
| where x ranges from 0 to 7. For more information on gpio refer to the section [http://www.gctronic.com/doc/index.php/Overo_Extension#GPIO_-_pins_mode GPIO - pins mode].
| |
| | |
| ==File system image==
| |
| You can download the entire system running on the micro sd released with the e-puck extension board from the following links: [https://projects.gctronic.com/Gumstix/epuck-overo-e2fs-12.08.14.tar.gz file system] and [https://projects.gctronic.com/Gumstix/epuck-overo-fat-30.03.15.tar.gz FAT] (with camera driver 1.3). <br/>
| |
| In order to prepare the micro sd you can use a script ([https://projects.gctronic.com/Gumstix/prepareMicroSD.sh prepareMicroSD.sh]), in which you need only to specify where to find the two previously downloaded files and run it (''./prepareMicroSD.sh /path/to/dev'') to have your micro sd ready to be used. Alternatively you can have a look the gumstix documentation on how to [https://www.gumstix.com/support/getting-started/create-bootable-microsd-card/ create a bootable microsd card].<br/>
| |
| <!--
| |
| <font style="color:red"> A new camera driver release (1.1) is available, refer to section [http://www.gctronic.com/doc/index.php/Overo_Extension#Camera_driver Camera driver] for information on how to update the system</font>. <br/>
| |
| -->
| |
| If you experience problems in booting from mmc enter u-boot and issue the following command:
| |
| <pre>
| |
| nand erase 240000 20000
| |
| reset
| |
| </pre>
| |
| Moreover if you need you can find pre-built images for the Gumstix Overo in the following link: [http://gumstix.org/download-prebuilt-images.html http://gumstix.org/download-prebuilt-images.html].
| |
| ===Sources===
| |
| The complete kernel sources (comprising the camera driver) can be downloaded from the following link [https://projects.gctronic.com/Gumstix/gctronic-ti-psp-omap-2.6.32-12.08.14.zip gctronic-ti-psp-omap-2.6.32-12.08.14.zip] if you want to try to build it your own (anyway you don't need to do it because the released micro SD is ready to run with this system). The system is based on:
| |
| <!--* [http://www.sakoman.com/feeds/omap3/glibc/images/overo/201005041130/ sakoman's pre-built file system image]-->
| |
| * sakoman's pre-built file system image
| |
| * [http://arago-project.org/git/people/?p=sriram/ti-psp-omap.git;a=summary ti-psp-2.6.32 kernel]
| |
| | |
| ===Camera driver===
| |
| The driver of the camera is open-source, you can download the code in the section [http://www.gctronic.com/doc/index.php/Overo_Extension#Sources kernel source]. The driver is located in <code>/ti-psp-omap/drivers/media/video/po6030cam.c</code>; related ISP code is located in <code>/ti-psp-omap/drivers/media/video/isp</code>.
| |
| ====Release notes====
| |
| :1.0
| |
| * support for PO6030 camera (front e-puck camera or camera of omnicam module version 1)
| |
| * support for RGB565 output format
| |
| * only 640x480 resolution images
| |
| :1.1
| |
| * added support for PO3030 camera
| |
| * added support for YUV422 output format
| |
| * brightness, contrast, saturation, auto-white balance, red gain, blue gain controls available
| |
| :1.2
| |
| * exposure control available
| |
| * support for 480x480 color and greyscale images
| |
| :1.3
| |
| * added support for PO8030 camera
| |
| | |
| ====System update====
| |
| In order to update the system released in the micro sd with the new driver you need to download the kernel modules from [https://projects.gctronic.com/Gumstix/driver-update/1.3/linux-2.6.32.tar.gz linux-2.6.32.tar.gz] and the kernel image from
| |
| [https://projects.gctronic.com/Gumstix/driver-update/1.3/uImage uImage]. Then:
| |
| # insert the micro sd in the computer; two partitions will be recognized
| |
| # copy the kernel image (uImage) in the FAT partition
| |
| # extract the kernel modules in the second partition:
| |
| ## cd path/to/partition
| |
| ## sudo tar zxvf path/to/kernel-modules
| |
| # unmount the micro sd from the computer and insert it in the extension; at first boot type ''depmod -a'' and reboot
| |
| | |
| ==Daemon==
| |
| It can be useful to start a daemon at the end of the boot process in order to run your own program at the start up of the e-puck (when the console mode won't be accessible). This can be done by placing your program executable into ''/etc/init.d'' and then:
| |
| <pre>
| |
| cp /path/to/your/executable /usr/sbin/mainProgram
| |
| cd /etc/init.d
| |
| update-rc.d mainProgram defaults 99
| |
| </pre>
| |
| | |
| The daemon can be removed by removing these files:
| |
| <pre>
| |
| rm /etc/rc*/*mainProgram*
| |
| </pre>
| |
| | |
| Remember to give execution permission to the program by typing <code>chmod +x mainProgram</code>.
| |
| | |
| =Hardware=
| |
| The following figure shows the main components offered by the e-puck extension for the Gumstix Overo COM and their interconnection with the e-puck robot and the Gumstix Overo COM.<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/Gumstix-schema.jpg <img width=600 src="http://www.gctronic.com/doc/images/Gumstix-schema.jpg">]</span> <br/>
| |
| In particular there are:
| |
| * a Gumstix Overo COMs: compatible with all Gumstix Overo COM models. The communication between the Gumstix Overo COM (OMAP 35xx) and the e-puck (dsPIC) is handled with a serial line at 230400 baud
| |
| * a mini-usb connector (console) used to enter the linux system through a terminal
| |
| * one usb otg and one usb host: these two connectors are really useful to connect whatever peripheral you need, like a WiFi dongle or simply a pen drive to extend the memory
| |
| * a speaker ([https://projects.gctronic.com/Gumstix/datasheet-speaker.pdf speaker specification]): with Linux running on the Gumstix Overo COM, it's really easy play any audio format you need or implement a speech synthesizer. If the user prefer to have the speaker on the extension linked to the e-puck processor, it can simply be done changing two small resistors
| |
| * 8 LEDs: have you ever seen a board without leds?! Anyway they are completely controllable through GPIO lines (gpio70-gpio77), for detailed information refer to section [http://www.gctronic.com/doc/index.php/Overo_Extension#GPIO_-_pins_mode GPIO - pins mode]
| |
| * an I2C connector (@5 V)
| |
| * a rotary selector: one could choose what program is running on the e-puck based on the selector position
| |
| * 2 long range infrared proximity sensors ([https://projects.gctronic.com/Gumstix/datasheet-long-range.pdf long range specification]) <!-- , up to 15-20 cm -->
| |
| * the PixelPlus PO6030 camera remains mounted on the robot, but you could receive image from it by using the OMAP ISP (Camera Interface Subsystem); this way we can receive up to 18 frames per second (VGA color images)
| |
| | |
| The following figure illustrates where the components are physically placed on the e-puck extension board for the Gumstix Overo COM. <br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/Gumstix-schema2.jpg <img width=600 src="http://www.gctronic.com/doc/images/Gumstix-schema2.jpg">]</span> <br/>
| |
| | |
| ==Electrical schema==
| |
| The circuit diagram of the e-puck extension for Gumstix Overo COM is available to the community on the following link [https://projects.gctronic.com/Gumstix/GC_EXT5_V3.pdf electrical schema].
| |
| | |
| ==Long range proximity sensors==
| |
| The following chart illustrates the long range proximity sensors response towards a white surface. These results should be considered indicative.<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/IR-characterization.jpg <img width=400 src="http://www.gctronic.com/doc/images/IR-characterization.jpg">]</span>
| |
| | |
| A zoom in the bigger distances shows that the values returned from the sensors are still usable to react to obstacles.
| |
| | |
| <chart width="600" height="300" legend_title="Legend" x_type="length" x_unit="cm" x_title="Distance" y_type="general" y_unit="ADC value" y_title="Prox">
| |
| Prox;14;203
| |
| Prox;16;154
| |
| Prox;18;128
| |
| Prox;20;105
| |
| Prox;22;88
| |
| Prox;24;78
| |
| Prox;26;70
| |
| </chart>
| |
| | |
| ==WiFi dongle==
| |
| ===Zyxel===
| |
| The WiFi dongle shipped with the extension board for the Gumstix Overo COM is a ZyXEL NWD271N USB adapter, 802.11n compatible. It's based on an Atheros chipset, for more infromation about the linux driver visit the following site [http://linuxwireless.org/en/users/Drivers/ar9170 http://linuxwireless.org/en/users/Drivers/ar9170]. <br/>
| |
| The measured throughput with the e-puck extension and provided wifi dongle is '''20 Mb/s'''. <br/>
| |
| The consumption of the wifi dongle is 100 mA in standby and 300 mA when active.
| |
| <!--During prototyping another WiFi dongle was used, the Trendnet -->
| |
| | |
| ===Edimax===
| |
| A new WiFi dongle is shipped starting from January 2012, it is the Edimax EW-7811Un, based on a Realtek chipset (RTL8192cu).
| |
| The device isn't recognized automatically at boot, so you need to follow these steps in order to enable and use it:
| |
| # turn on the robot and login with <code>user=root, password=root</code>
| |
| # only needed if the wifi dongle is connected to the USB OTG: type <code>./scripts/gumstix-common/usbenable otg</code>. Don't worry about the warning <code>usb 1-1: new config #1 exceeds power limit by 400mA</code>
| |
| # type <code>insmod 8192cu.ko</code> (the kernel module is located in /home/root); the wifi dongle should be recognized and a wlanX device created
| |
| # type <code>ifconfig wlanX up</code> (where X is a number) to turn on the device; now the wifi can be configured and used normally
| |
| The following figures show how the device is mounted on the extension: on the left the WiFi dongle is connected to the USB HOST connector (pay attention to the position on the connector), on the right the WiFi dongle is connected to the USB OTG (this is needed when using an [http://www.gctronic.com/doc/index.php/Omnivision_Module_V2 omnivsion extension]):<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/Gumstix-nano-wifi.jpg <img width=400 src="http://www.gctronic.com/doc/images/Gumstix-nano-wifi.jpg">]</span>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/edimax-otg.jpg <img width=350 src="http://www.gctronic.com/doc/images/edimax-otg-small.jpg">]</span> <br/>
| |
| | |
| ==Consumption==
| |
| The consumption of the robot and extension is 300 mA; with the Zyxel wifi dongle inserted (standby) the consumption goes up to 400 mA; when the wifi dongle becomes active, the consumption reaches 700 mA. If the wifi isn't used it can be turned off completely using the usb scripts [http://www.gctronic.com/doc/index.php/Overo_Extension#USB_ports http://www.gctronic.com/doc/index.php/Overo_Extension#USB_ports].
| |
| | |
| Two different tests were performed to provide an estimation of the duration of the battery:
| |
| # e-puck and gumstix active (gumstix sends commands via serial to robot; movement every 3s lasting 1s at 30% of maximum speed): '''3h and 30 minutes'''
| |
| # e-puck, gumstix and wifi active (same as above, moreover wifi active all the time with continuous ping): '''1h and 25 minutes'''
| |
| | |
| ==External power==
| |
| In the package you'll find also an external power adapter that will be useful during development of your applications. As power supply you could use the one of the e-puck battery charger. The following figure shows the power supply cable, the external power cable and the extension.<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/External-power.jpg <img width=400 src="http://www.gctronic.com/doc/images/External-power.jpg">]</span> <br/>
| |
| You need to simply attach the power supply in one side, and the other side of the external power cable on top of the extension (near the USB plug). Once the cable is connected a green led should turn on indicating that the extension is running. <br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/External-power-attached.jpg <img width=400 src="http://www.gctronic.com/doc/images/External-power-attached.jpg">]</span> <br/>
| |
| The external power cable could also be plugged in when the extension is mounted on the e-puck, but '''<font style="color:red"> pay attention to not turn on the robot when the external cable supplies the energy, otherwise there could be serious damages of the devices and the battery</font>'''.
| |
| | |
| ==3.3V and 5V source==
| |
| The 3.3 V comes from the e-puck robot and the 5V comes from the gumstix extension. The gumstix extension can be used alone (without the robot attached to it) but some things are related to the 3.3 V thus without the robot connected they will not work; an example are the RGB leds of the omnivion module, that need the robot to be connected to the extension in order to be used.
| |
| | |
| =Software=
| |
| ==E-puck firmware==
| |
| <!-- The firmware that has to be uploaded on the e-puck when working with the extension for Gumstix Overo COM can be downloaded from [https://projects.gctronic.com/E-Puck/DemoGCtronic-gumstix/DemoGCtronic-gumstix.hex hex]; the related MPLAB project can also be downloaded from [https://projects.gctronic.com/E-Puck/DemoGCtronic-gumstix/DemoGCtronic-gumstix.zip MPLAB project]. -->
| |
| Refers to the section [http://www.gctronic.com/doc/index.php/E-Puck#Standard_firmware E-Puck Standard firmware] for the firmware that need to be uploaded to the robot.
| |
| Essentially in this firmware a new version of the ''advanced sercom'' is included (selector position 10) in which the bluetooth communication is replaced by the serial line communication, running at 230400 between robot and gumstix. Moreover the I2C is disabled temporary from the dsPIC side (the dsPIC cannot communicate through I2C) in order to avoid conflicts. As a last note, the body led and front led aren't anymore usable with the extension due to the two extra long range proximity sensors and for power saving purposes the motors are configured to the minimum energy consumption during movement.<br/>
| |
| The values of the two extra proximity sensors can be retrieved with the command ''N'' in the ''advanced sercom'' (selector position 10); the last two values returned by the command refer to these proximity sensors (the others values refer to the proximity sensors mounted on the e-puck as usual).
| |
| | |
| ===Project building===
| |
| Refer to section [http://www.gctronic.com/doc/index.php/E-Puck#Project_building Project building] for information on how to build the project for the e-puck firmware.
| |
| | |
| ==Cross compilation==
| |
| If you want to develop some applications that will run on the gumstix you need to firstly download the toolchain.
| |
| | |
| If you're using Ubuntu you can simply type <code>sudo apt-get install gcc-arm-linux-gnueabi g++-arm-linux-gnueabi</code> to install the required toolchain (have a look at [http://www.gumstix.org/basic-cross-compilation.html http://www.gumstix.org/basic-cross-compilation.html] and [http://wiki.gumstix.org/index.php?title=Toolchain http://wiki.gumstix.org/index.php?title=Toolchain] for more information).
| |
|
| |
|
| Alternatively when you need to handle external dependencies is better using the toolchain integrated in OpenEmbedded (${OVEROTOP}/tmp/cross or ${OVEROTOP}/tmp/sysroots/i686-linux/usr/armv7a/bin/ with recent version) if you have it in your system. For more information refers to the [http://wiki.gumstix.org/index.php?title=Category:How_to_-_OpenEmbedded gumstix wiki].<br/>
| | ===e-puck1=== |
| | The e-puck1 robot must be programmed with the following firmware [https://raw.githubusercontent.com/yorkrobotlab/pi-puck/master/e-puck1/pi-puck-e-puck1.hex pi-puck-e-puck1.hex]. |
|
| |
|
| For other linux systems you can find a toolchain in the following link [http://www.mentor.com/embedded-software/sourcery-tools/sourcery-codebench/editions/lite-edition/ http://www.mentor.com/embedded-software/sourcery-tools/sourcery-codebench/editions/lite-edition/] (30 days trial); this toolchain is useful for small programs:
| | ===e-puck2=== |
| # download the Lite Edition, you'll have a file named something like ''arm-2009q3-67-arm-none-linux-gnueabi.bin''
| | The e-puck2 robot must be programmed with the following firmware [https://projects.gctronic.com/epuck2/gumstix/e-puck2_main-processor_extension_b346841_07.06.19.elf e-puck2_main-processor_extension.elf (07.06.19)] and the selector must be placed in position 10.<br/> |
| # open a terminal, go to the directory of the file, type ''chmod +x arm-2009q3-67-arm-none-linux-gnueabi.bin'', after execute the file ''./arm-2009q3-67-arm-none-linux-gnueabi.bin'' to start the installation
| | The source code is available in the <code>gumstix</code> branch of the repo <code>https://github.com/e-puck2/e-puck2_main-processor</code>. |
| # follow the installation steps; you have to choose where to install the toolchain, this is the path you will specify in the makefile
| |
|
| |
|
| Once a toolchain is installed in the system the process will be simply something like this:
| | ==Turn on/off the extension== |
| # develop your application as you do normally in your developing machine
| | To turn on the extension you need to press the <code>auxON</code> button as shown in the follwoing figure; this will turn on also the robot (if not already turned on). Similarly, if you turn on the robot then also the extension will turn on automatically.<br/> |
| # cross-compile in your developing machine using the tools previously downloaded
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck_btn_on_off.jpg <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck_btn_on_off-small.jpg">]</span><br/> |
| # copy the executable in the extension's micro SD and run it
| |
| You can download the [https://projects.gctronic.com/Gumstix/helloworld.zip hello world example] containing a makefile in which you have to specify the path to the toolchain you previously installed in order to build the program; you can use it for others programs.<br/>
| |
| Refer to section [http://www.gctronic.com/doc/index.php/Overo_Extension#Demos http://www.gctronic.com/doc/index.php/Overo_Extension#Demos] for some application examples.
| |
| | |
| Of course you can also install the compiler directly on the embedded system and build the applications from it, but the process will take longer due to limited computational power compared to a developing machine.
| |
| | |
| ===External dependencies===
| |
| Some applications may require external libraries not contained within the standard toolchain package. For instance if your application depends on ''libjpeg'' then you need to tell the cross-compiler where to look to find this library (compiled for the target machine) otherwise your application will not be compiled. If you have OpenEmbedded installed in your system you could simply bitbake the external dependencies (in our example ''bitbake jpeg'') and then compile your application. Instead if you rely on the CodeSourcery toolchain you need to follow these steps:
| |
| # download the sources of the library
| |
| # cross-compile the library
| |
| # install the library (and include files) in the right places
| |
| # compile your application
| |
| | |
| ==Ground sensor==
| |
| It's possible to use contemporaneously both the e-puck extension for gumstix overo and the ground sensor; in this case the camera and the ground sensor will share the same I2C bus and like the camera, also the ground sensor will not be anymore reachable from the e-puck side, but only from the overo side. <br/>
| |
| The I2C bus is configured to work at 400 KHz in the system running on the gumstix overo, thus we need to change the bus speed to 100 KHz in order to communicate with the ground sensor module; the simplest way is to set a kernel parameter in u-boot:
| |
| # enter u-boot by pressing any key at boot start
| |
| # type the command <code>setenv i2cspeed 3,100</code>; this init the I2C bus 3 to 100 KHz
| |
| # type the command <code>setenv mmcargs setenv bootargs console=${console} i2c_bus=${i2cspeed} ${optargs} mpurate=${mpurate} vram=${vram} omapfb.mode=dvi:${dvimode} omapdss.def_disp=${defaultdisplay} root=${mmcroot} rootfstype=${mmcrootfstype} </code>; basically we pass an additional parameter to the kernel that is the <code>i2c_bus=${i2cspeed}</code>
| |
| # type the command <code>saveenv</code> to save the environment changes
| |
| # type <code>boot</code> to start booting
| |
| Pay attention that all the peripherals connected to the bus will now work at 100 KHz, thus also the e-puck camera and the LSM330 (accelerometer + gyroscope) present with e-puck HwRev 1.3.<br/>
| |
| If you want to set back the bus speed to 400 KHz you need to follow steps 2-4, by setting the <code>i2cspeed</code> u-boot environment variable with <code>setenv i2cspeed 3,400</code>.<br/>
| |
| Communicating with the ground sensor is as easy as open a device and reading from it; a source code example can be found in the following link [https://projects.gctronic.com/Gumstix/groundsensor.c https://projects.gctronic.com/Gumstix/groundsensor.c]. You will find this application example in the <code>/home/root/demos/gumstix-common</code> directory; start it by executing <code>./i2c_groundsensors</code> and the sensors values will be displayed in the terminal.<br/>
| |
| Make sure that you have installed the last system update otherwise you'll encounter some problems.<br/>
| |
| You can find more information about the I2C and gumstix in the following links:
| |
| * [https://wiki.gumstix.com/index.php/Category:How_to_-_i2c https://wiki.gumstix.com/index.php/Category:How_to_-_i2c]
| |
| <!--
| |
| ===Examples===
| |
| ====Images transfer (serial line)====
| |
| The application "transfer_images" running on the Gumstix Overo COM performs a request of a variable number of images to the e-puck and transfers them over either TCP or UDP to a server machine (a connection must be configured on both sides before running this program). For more information on the usage refers to the help (-h option). This demo works with the ''advanced sercom'' protocol, so the new e-puck firmware must be already charged and selector 10 must be chosen.<br/>
| |
| In order to compile the application the Makefile must be modified specifying the path to the cross-compiler (for more information on cross-compilation for the OMAP3530 processor refers to [http://focus.ti.com/docs/prod/folders/print/omap3503.html http://focus.ti.com/docs/prod/folders/print/omap3503.html]).
| |
| [[image:ImageReceiver.jpeg|thumb|Image receiver application.]]
| |
| The application "ImageReceiver" running on the server machine is used to visualize the images received from the e-puck. <br/>
| |
| The usage is very simple: the server listening port and the protocol must be first selected and then the button "Connect" clicked; at this moment the application is waiting images.
| |
| The application is a Qt project, so the compilation may be handled easily with [http://www.qtsoftware.com/products/developer-tools Qt Creator]; alternatively [http://doc.trolltech.com/4.2/qmake-manual.html qmake] can be used.
| |
| | |
| It's worth to note that the server application must be started before sending images, thus the "ImageReceiver" application must be first executed on the PC side, and the "transfer_images" application must be then executed on the Gumstix Overo side.
| |
| | |
| [http://www.gctronic.com/doc/images/Image_transfer.tar Download Transfer images (Linux)] <br/>
| |
| [http://www.gctronic.com/doc/images/Image_receiver.tar Download Image receiver (Linux)]
| |
| | |
| ====Images grabbing (serial line)====
| |
| This application, running on the Overo COM, requests to the e-puck a customizable number of images that can be parametrized by size, zoom factor, type (gray-scale or color) and window position and save them as bmp; for more information on the usage refers to the help (-h option). This demo works with the ''advanced sercom'' protocol, so the new e-puck firmware must be already charged and selector 10 must be chosen.<br/>
| |
| In order to compile the application the Makefile must be modified specifying the path to the cross-compiler like with the "Images transfer" application.
| |
| | |
| [http://www.gctronic.com/doc/images/GrabCustomImages.tar Download Grab custom images (Linux)]
| |
| | |
| -->
| |
| | |
| ==OpenCV==
| |
| The Open Computer Vision Library has more than 500 algorithms, documentation and sample code for real time computer vision; you can download it from [http://sourceforge.net/projects/opencvlibrary/ http://sourceforge.net/projects/opencvlibrary/], and find information about it from the official wiki [http://docs.opencv.org/index.html http://docs.opencv.org/index.html]. <br/>
| |
| The released system comes with OpenCV version 2.0.0 pre-installed and a demo that shows an example of what can be performed with this library. The demo let the robot follow a black filled circle placed in front of it; if the circle is moved right or left the robot turns consequently. The following figure shows an example of the circle detected by the robot:<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/circle-detection.jpg <img width=200 src="http://www.gctronic.com/doc/images/circle-detection.jpg">]</span> <br/> | |
| In order to start the demo follows these steps:
| |
| # turn on the robot with the gumstix extension and login as ''root'' with password ''root''
| |
| # go to the directory ''/home/root/demos/gumstix-common'' and execute ''./v4l2grab-opencv -o image.jpg''
| |
| # the demo should return the number of circles detected and save a resulting image showing the circles detected if any
| |
| Alternatively you can use the following script, that launches the demo and send it through serial (using zmodem) iteratively:
| |
| <pre>
| |
| #!/bin/bash
| |
| while true; do
| |
| ./v4l2grab-opencv -o image.jpg -q 50
| |
| lsz img1.jpg
| |
| done
| |
| </pre>
| |
| | |
| The source code can be downloaded from the following link [https://projects.gctronic.com/Gumstix/v4l2grab-opencv-rev15.zip v4l2grab-opencv.zip].
| |
| | |
| <!--
| |
| ====Opencv-linux 1.1pre1 version====
| |
| OpenCV can be easily installed on the Gumstix Overo COM, following these steps:
| |
| | |
| :1. [http://sourceforge.net/projects/opencvlibrary/ Donwload] OpenCV.
| |
| :2. Extract the content (tar -xzvf opencv-1.1pre1.tar.gz) of the file in a directory, let it be in "opencv".
| |
| :3. Open a terminal, and access the directory (cd path/to/opencv).
| |
| :4. Configure the environment in order to use the cross-compilation tools (if you installed OpenEmbedded, you can find these tools in /tmp/cross/bin/ within the OE main directory): <br/>
| |
| <pre>
| |
| export CC=/path_to_OE_home_dir/tmp/cross/bin/arm-angstrom-linux-gnueabi-gcc
| |
| export CXX=/path_to_OE_home_dir/tmp/cross/bin/arm-angstrom-linux-gnueabi-g++
| |
| </pre>
| |
| :5. Now configure OpenCV with the following command; in this configuration several packages are disabled (e.g. gtk) because useless when using console mode to work with the gumstix. Another important option is ''prefix'', which tell where the OpenCV library will be installed. For more information on the configuration refers to the help (--help).<br/>
| |
| <pre>
| |
| ./configure --host=arm-linux --build=i686-linux --prefix=/install_dir_path/ --without-gthread --without-gtk --without-python --disable-apps
| |
| </pre>
| |
| :6. Type ''make'' and then ''make install''; the directory specified with the ''prefix'' options will contain the compiled library.
| |
| :7. Copy the content of this directory to the gumstix, for example in an external SD card.
| |
| :8. Before trying to execute an OpenCV based application, you must specify to the system where to find the OpenCV library; you can do this by typing the following command; alternatively it's possible to install directly the library in the /usr/lib directory in the system.
| |
| <pre>
| |
| export LD_LIBRARY_PATH=/path_to_OpenCV/lib
| |
| </pre>
| |
| | |
| A detailed tutorial on the OpenCV setup for Gumstix can be found in the following link [http://danielbaggio.blogspot.com/2009/01/compiling-opencv-for-gumstix.html Compiling OpenCV for Gumstix].
| |
| | |
| ====Later versions (> 1.1)====
| |
| It's possible to have the OpenCV framework available on your system in two ways:
| |
| :1. if OpenEmbedded and bitbake are already configured in the system you can simply type ''bitbake opencv'' and then install the libraries on the micro-sd of the overo
| |
| :2. if you have internet access from the overo you can use the package manager by typing ''opkg install opencv'' (it takes a while to complete)
| |
| -->
| |
| | |
| <!--
| |
| Later versions of OpenCV (current is 2.0.0) rely on [http://www.cmake.org/ CMake], the cross-platform, open-source build system.You can install it in Ubuntu by typing ''sudo apt-get install cmake''; you can also install a nice front-end for CMake by typing ''sudo apt-get install cmake-gui''; in this way the configuration process of OpenCV becomes easier.<br>
| |
| Follow the steps afterwards to get the newer version of OpenCV compiled for the gumstix:
| |
| :1. [http://sourceforge.net/projects/opencvlibrary/ Donwload] OpenCV.
| |
| :2. Extract the content (tar -xzvf opencv-2.0.0.tar.gz) of the file in a directory, let it be in "opencv".
| |
| :3. Start the CMake interface, by typing in a terminal ''cmake-gui''.
| |
| :4. ...to be finished!
| |
| -->
| |
|
| |
|
| ==Accelerometer and gyroscope (e-puck HWRev 1.3)==
| | To turn off the Pi-puck you need to press and hold the <code>auxON</code> button for 2 seconds; this will initiate the power down procedure.<br> |
| When the e-puck extension for gumstix overo is mounted on the e-puck hardware revision 1.3 the same I2C bus is shared by all the devices (camera, accelerometer, gyroscope) and the overo; since there is only one master (the overo) these devices will not be anymore reachable from the e-puck side. <br/>
| |
| The I2C bus is configured to work at 400 KHz in the system running on the gumstix overo and this is fine to work with the accelerometer and gyroscope. <br/>
| |
| Communicating with the accelerometer and gyroscope is as easy as open a device and reading from it; a source code example can be found in the following link [https://projects.gctronic.com/Gumstix/i2c_lsm330.c i2c_lsm330.c]. You will find this application example in the <code>/home/root/demos/gumstix-common</code> directory; start it by executing <code>./i2c_lsm330</code>, type <code>0</code> to get the accelerometer values or <code>1</code> to get the gyroscope values printed on the terminal.<br/>
| |
| The values of the accelerometer and gyroscope read from the gumstix through the I2C are 16 bits (1g = 16384); beware that regarding the accelerometer values there is a mismatch between the values read from the gumstix through I2C and the values read from the [{{fullurl:Advanced sercom protocol}} advanced sercom protocol] through Bluetooth, the latter are converted in the firmware to maintain compatibility with older e-puck hardware revisions.<br/>
| |
| The orientation of the accelerometer for the values read from the gumstix through the I2C is also different from the one used in the e-puck firmware; the orientation is shown below, the x axis points forward, the y axis points left and the z axis points upward:<br/>
| |
| <span class="plainlinks">[http://www.gctronic.com/doc/images/epuck-acc-directions1.3.png <img width=150 src="http://www.gctronic.com/doc/images/epuck-acc-directions1.3.png">]</span><br/>
| |
| ===Python===
| |
| An example in python is available from the following link [https://projects.gctronic.com/Gumstix/i2c_lsm330.py i2c_lsm330.py]. In order to run the script, some additional dependencies need to be installed in the system, follow these steps:
| |
| # configure the network in order to have internet access
| |
| # update the package manager repos:
| |
| ##<code>echo 'src/gz base http://feeds.angstrom-distribution.org/feeds/v2012.12/ipk/eglibc/armv7a-vfp-neon/base/' > /etc/opkg/base-feed.conf</code>
| |
| ##<code>echo 'src/gz python http://feeds.angstrom-distribution.org/feeds/v2012.12/ipk/eglibc/armv7a-vfp-neon/python/' > /etc/opkg/python-feed.conf</code>
| |
| # add <code>arch armv7a-vfp-neon 45</code> to the file <code>/etc/opkg/arch.conf</code>
| |
| # <code>opkg update</code>
| |
| # <code>opkg -force-overwrite install python-smbus</code>
| |
| # optionally you can also remove some warnings related to the update by running the following script [https://projects.gctronic.com/omnicam/remove-warnings.sh remove-warnings.sh]
| |
| Once the system is configured you can start the script by executing <code>python i2c_lsm330.py</code>, type <code>0</code> to get the accelerometer values or <code>1</code> to get the gyroscope values printed on the terminal.<br/>
| |
|
| |
|
| ==ROS==
| | Beware that by turning off the robot, the extension will not be turned off automatically if it is powered from another source like the micro usb cable or a secondary battery. You need to use its power off button to switch it off. Instead if there is no other power source, then by turning off the robot also the extension will be turned off (not cleanly). |
| We tested ROS on the gumstix extension with the Yocto system. Follow these steps to get ROS running on the e-puck extension:
| |
| :1. prepare a micro sd following the instructions from [http://gumstix.org/create-a-bootable-microsd-card.html http://gumstix.org/create-a-bootable-microsd-card.html]
| |
| :2. download the file system and fat from the following links: [https://projects.gctronic.com/Gumstix/yocto-ros-3.5.7-FAT.tar.gz yocto-ros-3.5.7-FAT.tar.gz], [https://projects.gctronic.com/Gumstix/yocto-ros-3.5.7-rootfs.tar.gz yocto-ros-3.5.7-rootfs.tar.gz]
| |
| :3. login with user=root and empty password
| |
| :4. issue the following commands to enable the WiFi dongle:
| |
| ::<code>echo host > /sys/bus/platform/devices/musb-hdrc/mode</code>
| |
| ::<code>echo -n 1 > /sys/bus/usb/devices/2-1/bConfigurationValue</code>
| |
| :5. follow the instructions from [https://github.com/gumstix/yocto-manifest/wiki/ROS-on-Gumstix#the-fun-part https://github.com/gumstix/yocto-manifest/wiki/ROS-on-Gumstix#the-fun-part] to run a demo
| |
| <!--
| |
| We tested ROS on the gumstix extension with the Yocto pre-built system. Follow these steps to get ROS running on the e-puck extension:
| |
| :1. download the Yocto pre-built image from [https://www.gumstix.com/software/software-downloads/ https://www.gumstix.com/software/software-downloads/] (Overo Series COMs)
| |
| :2. prepare a micro sd following the instructions from [http://gumstix.org/create-a-bootable-microsd-card.html http://gumstix.org/create-a-bootable-microsd-card.html]
| |
| :3. configure the network settings in order to get internet access (at the moment you need to plug the WiFi dongle on the USB host)
| |
| :4. follow the instructions from [https://github.com/gumstix/yocto-manifest/wiki/ROS-on-Gumstix#one-time-on-system-setup https://github.com/gumstix/yocto-manifest/wiki/ROS-on-Gumstix#one-time-on-system-setup] (skip step 1)
| |
| If you prefer you can directly download the file system and fat from the following links: [https://projects.gctronic.com/Gumstix/yocto-ros-3.5.7-FAT.tar.gz yocto-ros-3.5.7-FAT.tar.gz], [https://projects.gctronic.com/Gumstix/yocto-ros-3.5.7-rootfs.tar.gz yocto-ros-3.5.7-rootfs.tar.gz].
| |
| -->
| |
|
| |
|
| ==Python== | | ==Console mode== |
| In order to install python 2.6 on the e-puck extension for Gumstix follow these steps: | | The Pi-puck extension board comes with a pre-configured system ready to run without any additional configuration.<br/> |
| # download the package [https://projects.gctronic.com/Gumstix/python-gumstix.tar.gz python-gumstix.tar.gz]
| | In order to access the system from a PC in console mode, the following steps must be performed:<br/> |
| # extract the package: <code>tar -zxvf python-gumstix.tar.gz</code>
| | 1. connect a micro USB cable from the PC to the extension module. If needed, the drivers are available in the following link [https://www.silabs.com/products/development-tools/software/usb-to-uart-bridge-vcp-drivers USB to UART bridge drivers]<br/> |
| # remove the micro sd from the robot and connect it to your computer; two partitions will be opened, one called <code>FAT</code> and the other called <code>overo</code> containing the file system (the partitions name could be a little different)
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck_usb.png <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck_usb-small.png">]</span><br/> |
| # copy the content of the decompressed file to the same position in the <code>overo</code> partition:
| | 2. execute a terminal program and configure the connection with 115200-8N1 (no flow control). The serial device is the one created when the extension is connected to the computer<br/> |
| ##<code>sudo cp -R /python-gumstix/usr/lib/* /overo/usr/lib</code>
| | 3. switch on the robot (the extension will turn on automatically); now the terminal should display the Raspberry Pi booting information. If the robot isn't present, then you can directly power on the extension board with the related button<br/> |
| ##<code>sudo cp /python-gumstix/usr/bin/* /overo/usr/bin</code>
| | 4. login with <code>user = pi</code>, <code>password = raspberry</code><br/> |
|
| |
|
| Alternatively if you have access to internet you can use the package manager:
| | ==Battery charge== |
| # <code>opkg install python</code>
| | You can either charge the robot battery or the additional battery connected to the Pi-puck extension or both the batteries by simply plugging the micro USB cable.<br/> |
| # <code>opkg install python-modules</code>
| | The following figure shows the connector for the additional battery.<br/> |
| # <code>opkg install python-pyserial</code>
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck_battery.jpg <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck_battery-small.jpg">]</span><br/> |
|
| |
|
| In order to test your python installation you can download the following script [https://projects.gctronic.com/Gumstix/printhelp.py printhelp.py]; execute it by typing <code>python printhelp.py</code>.
| | The robot can also autonomously charge itself if the charging wall is available. The Pi-puck extension includes two spring contacts on the front side that let the robot easily make contact with the charging wall and charge itself. The charging wall and the spring contacts are shown in the following figures:<br/> |
| This is a minimal example of serial communication in python that let the gumstix communicate with the robot; basically it opens a serial connection with the robot and ask the available commands that you can use to get sensors data and change actuators state.<br/>
| | <span class="plainlinks">[https://www.gctronic.com/img2/shop/pipuck-charger-robot.jpg <img width=250 src="https://www.gctronic.com/img2/shop/pipuck-charger-robot-small.jpg">]</span> |
| Another example is available here [https://projects.gctronic.com/Gumstix/getprox.py getprox.py]; in this script the values of the proximities are requested to the robot and printed to the console. The data are requested in binary format, for more information about the communication protocol refer to the section [http://www.gctronic.com/doc/index.php/Overo_Extension#Advanced_sercom advanced sercom].
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck_contacts.jpg <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck_contacts-small.jpg">]</span><br/> |
| ==e-puck2==
| |
| When the gumstix extension is mounted on the e-puck2 robot, the same I2C bus is shared by all the devices (camera, IMU, distance sensor, others extensions), the main microcontroller and the overo; since there is only one master (the overo), these devices will not be anymore reachable directly from the e-puck2 main microcontroller that will act instead as I2C slave.<br/>
| |
| It's worth notice that with e-puck2, the I2C bus is used also for the communication between the robot and the gumstix (to receive sensors and set the actuators); with e-puck1.x a serial channel was used instead for the communication between the robot and the gumstix.
| |
|
| |
|
| ===Firmware=== | | ==Reset button== |
| A special firmware must be uploaded to the e-puck2 robot in order to let the main processor act as I2C slave.<br/> | | A button is available to reset the robot, when pressed it will resets only the robot restarting its firmware. This is useful for instance during development or for specific demos in which a restart of the robot is needed. In these cases you don't need to turn off completely the robot (and consequently also the Pi-puck if energy is supplied by the robot) but instead you can simply reset the robot. The position of the reset button is shown in the following figure:<br/> |
| In this firmware the main processor receive commands from the gumstix extension to actuate the motors and leds and give back the sensors values (proximity, microphones, selector, motors steps, tv remote) to the gumstix. When using this firmware the body led and front led aren't usable; the two extra long range proximity sensors mounted on the gumstix extension are also not available with e-puck2.<br/> | | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pipuck_reset.png <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pipuck_reset-small.png">]</span><br/> |
| The selector on the robot must be in position 10. Be sure that the selector on the robot is in position 10, because the selector on the gumstix extension is not connected to the e-puck2 robot.<br/>
| |
|
| |
|
| The pre-compiled firmware can be downloaded from [https://projects.gctronic.com/epuck2/gumstix/e-puck2_main-processor_extension_b346841_07.06.19.elf e-puck2_main-processor_extension.elf (07.06.19)].<br/>
| | =How to communicate with the robot and its sensors= |
| If you want to have a look a the source code, you can clone the git repository by issueing the command <code>git clone -b gumstix --recursive https://github.com/e-puck2/e-puck2_main-processor.git</code>.<br/>
| | ==Communicate with the e-puck1== |
| | Refer to the repo [https://github.com/yorkrobotlab/pi-puck-e-puck1 https://github.com/yorkrobotlab/pi-puck-e-puck1]. |
|
| |
|
| An example showing how to exchange data between the robot and the gumstix extension is called <code>i2c_e-puck2</code> and can be found in the directory <code>/home/root/demos/e-puck2/</code>.<br/> | | ==Communicate with the e-puck2== |
| Simply run the program by issueing <code>./i2c_e-puck2</code>; this demo will print the sensors data on the terminal and send some commands to the robot at 2 Hz. The code is available from [https://projects.gctronic.com/epuck2/gumstix/i2c_e-puck2.zip i2c_e-puck2.zip].
| | An example showing how to exchange data between the robot and the Pi-puck extension is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/e-puck2/</code>.<br/> |
| | You can build the program with the command <code>gcc e-puck2_test.c -o e-puck2_test</code>.<br/> |
| | Now you can run the program by issueing <code>./e-puck2_test</code>; this demo will print the sensors data on the terminal and send some commands to the robot at 2 Hz.<br/> |
| | The same example is also available in Python, you can run it by issueing <code>python3 e-puck2_test.py</code>. |
|
| |
|
| ====Packet format====
| | ===Packet format=== |
| Gumstix to robot packet format, 20 bytes payload (the number in the parenthesis expresses the bytes for each field):
| | Extension to robot packet format, 20 bytes payload (the number in the parenthesis represents the bytes for each field): |
| {| border="1" | | {| border="1" |
| | Left speed (2) | | | Left speed (2) |
| Line 605: |
Line 91: |
| |} | | |} |
| * Left, right speed: [-2000 ... 2000] | | * Left, right speed: [-2000 ... 2000] |
| * Speaker id: [0, 1, 2] | | * Speaker: sound id = [0, 1, 2] |
| * LEDs on/off flag: bit0 for LED1, bit1 for LED3, bit2 for LED5, bit3 for LED7 | | * LEDs on/off flag: bit0 for LED1, bit1 for LED3, bit2 for LED5, bit3 for LED7 |
| * RGB LEDs: [0 (off) ... 100 (max)] | | * RGB LEDs: [0 (off) ... 100 (max)] |
| Line 614: |
Line 100: |
| * Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..18) | | * Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..18) |
|
| |
|
| Robot to gumstix packet format, 47 bytes payload (the number in the parenthesis expresses the bytes for each field): | | Robot to extension packet format, 47 bytes payload (the number in the parenthesis represents the bytes for each field): |
| {| border="1" | | {| border="1" |
| | 8 x Prox (16) | | | 8 x Prox (16) |
| Line 628: |
Line 114: |
| * Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..45) | | * Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..45) |
|
| |
|
| ===I2C devices=== | | ==Communicate with the IMU== |
| ====Ground sensor==== | | ===e-puck1=== |
| Refer to section [http://www.gctronic.com/doc/index.php?title=Overo_Extension#Ground_sensor Ground_sensor].
| | An example written in C showing how to read data from the IMU (LSM330) mounted on e-puck 1.3 is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/e-puck1/</code>.<br/> |
| | You can build the program with the command <code>gcc e-puck1_imu.c -o e-puck1_imu</code>.<br/> |
| | Now you can run the program by issueing <code>./e-puck1_imu</code> and then choose whether to get data from the accelerometer or gyroscope; this demo will print the sensors data on the terminal.<br/> |
|
| |
|
| ====IMU==== | | ===e-puck2=== |
| An example showing how to read data from the IMU is called <code>i2c_mpu9250</code> and can be found in the directory <code>/home/root/demos/e-puck2/</code>.<br/> | | An example showing how to read data from the IMU (MPU-9250) is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/e-puck2/</code>.<br/> |
| Simply run the program by issueing <code>./i2c_mpu9250</code> and then choose whether to get data from the accelerometer or gyroscope; this demo will print the sensors data on the terminal. The code is available from [https://projects.gctronic.com/epuck2/gumstix/i2c_mpu9250.zip i2c_mpu9250.zip].
| | You can build the program with the command <code>gcc e-puck2_imu.c -o e-puck2_imu</code>.<br/> |
| | Now you can run the program by issueing <code>./e-puck2_imu</code> and then choose whether to get data from the accelerometer or gyroscope; this demo will print the sensors data on the terminal.<br/> |
| | The same example is also available in Python, you can run it by issueing <code>python3 e-puck2_imu.py</code>. |
|
| |
|
| ====Distance sensor==== | | ==Communicate with the ToF sensor== |
| | The Time of Flight sensor is available only on the e-puck2 robot.<br/> |
|
| |
|
| =Configuration=
| | First of all you need to verify that the VL53L0X Python package is installed with the following command: <code>python3 -c "import VL53L0X"</code>. If the command returns nothing you're ready to go, otherwise if you receive an <code>ImportError</code> then you need to install the package with the command: <code>pip3 install git+https://github.com/gctronic/VL53L0X_rasp_python</code>.<br/> |
| ==Graphic mode==
| |
| The resolution of the monitor can be modified in the u-boot command line, that can be entered at booting. In the u-boot command line type:
| |
| <pre> | |
| setenv dvimode "1280x720MR-16@60"
| |
| saveenv
| |
| boot
| |
| </pre> | |
| Now the configuration is saved in the flash; if your monitor doesn't support the current resolution, repeat the procedure with a different configuration (change the resolution numbers).
| |
|
| |
|
| Note that the DVI Controller ([https://projects.gctronic.com/Gumstix/tfp410.pdf TFP410]) mounted on Summit and Tobi supports resolutions from VGA (640x480) to UXGA (1600x1200).
| | A Python example showing how to read data from the ToF sensor is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/e-puck2/</code>.<br/> |
| | You can run the example by issueing <code>python3 VL53L0X_example.py</code> (this is the example that you can find in the repository [https://github.com/gctronic/VL53L0X_rasp_python/tree/master/python https://github.com/gctronic/VL53L0X_rasp_python/tree/master/python]). |
|
| |
|
| Useful files to look at:
| | ==Capture an image== |
| * linux_source_home/drivers/video/modedb.c: explains what's the mean of the dvimode names
| | The robot camera is connected to the Pi-puck extension as a USB camera, so you can access it very easily.<br/> |
| * linux_source_home/Documentation/fb/viafb.modes: list of available modes usable with the ''fbset'' tool
| | An example showing how to capture an image from the robot's camera using OpenCV is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/snapshot/</code>.<br/> |
| | You can build the program with the command <code>g++ $(pkg-config --libs --cflags opencv) -ljpeg -o snapshot snapshot.cpp</code>.<br/> |
| | Now you can run the program by issueing <code>./snapshot</code>; this will save a VGA image (JPEG) named <code>image01.jpg</code> to disk.<br/> |
| | The program can accept the following parameters:<br/> |
| | <code>-d DEVICE_ID</code> to specify the input video device from which to capture an image, by default is <code>0</code> (<code>/dev/video0</code>). This is useful when working also with the [http://www.gctronic.com/doc/index.php?title=Omnivision_Module_V3 Omnivision V3] extension that crates another video device; in this case you need to specify <code>-d 1</code> to capture from the robot camera.<br/> |
| | <code>-n NUM</code> to specify how many images to capture (1-99), by default is 1<br/> |
| | <code>-v</code> to enable verbose mode (print some debug information)<br/> |
| | Beware that in this demo the acquisition rate is fixed to 5 Hz, but the camera supports up to '''15 FPS'''.<br/> |
| | The same example is also available in Python, you can run it by issueing <code>python3 snapshot.py</code>. |
|
| |
|
| ==GPIO - pins mode== | | ==Communicate with the ground sensors extension== |
| There are three different ways to read GPIO lines:
| | Both e-puck1 and e-puck2 support the [https://www.gctronic.com/doc/index.php?title=Others_Extensions#Ground_sensors ground sensors extension].<br/> |
| :1. Kernel space: GPIO lines handled through an API
| | This extension is attached to the I2C bus and can be read directly from the Pi-puck.<br/> |
| :2. User space:
| | An example written in C showing how to read data from the ground sensors extension is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/ground-sensor/</code>.<br/> |
| ::2.1. standard filesystem commands like ''cat'' and ''echo'' (static configuration)
| | You can build the program with the command <code>gcc groundsensor.c -o groundsensor</code>.<br/> |
| ::2.2 direct physical memory access using ''devmem2'' or with a C application (dynamic configuration)
| | Now you can run the program by issueing <code>./groundsensor</code>; this demo will print the sensors data on the terminal.<br/> |
| | The same example is also available in Python, you can run it by issueing <code>python3 groundsensor.py</code>. |
|
| |
|
| Afterward will be explained how to handle the GPIO lines on the Gumstix Overo COM in all different methods; information about this topic were found from various sites, but especially from the [http://sourceforge.net/p/gumstix/mailman/ mailing list]. Moreover for a general howto on GPIO refers to the linux documentation [https://www.kernel.org/doc/Documentation/gpio/gpio.txt "KernelSrc/Documentation/gpio.txt"].
| | ==Communicate with the range and bearing extension== |
| | Both e-puck1 and e-puck2 support the [https://www.gctronic.com/doc/index.php?title=Others_Extensions#Range_and_bearing range and bearing extension].<br/> |
| | This extension is attached to the I2C bus and can be read directly from the Pi-puck.<br/> |
| | An example written in C showing how to start playing with the range and bearing extension is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/randb/</code>. You need two boards: one is the transmitter (run <code>randb_tx</code>) and the other is the receiver (run <code>randb_rx</code>). The receiver will print the data received from the transmitter.<br/> |
| | You can build the programs with the command <code>gcc randb_tx.c -o randb_tx</code> and <code>gcc randb_rx.c -o randb_rx</code>.<br/> |
| | The same example is also available in Python, you can run it by issueing <code>python3 randb_tx.py</code> and <code>python3 randb_rx.py</code>. |
|
| |
|
| ===Kernel space=== | | ==Wireless remote control== |
| | If you want to control the robot from a computer, for instance when you have an algorithm that requires heavy processing not suitable for the Pi-puck or when the computer acts as a master controlling a fleet of robots that return some information to the controller, then you have 3 options:<br/> |
| | 1) The computer establishes a WiFi connection with the Pi-puck to receive data processed by the Pi-puck (e.g. results of an image processing task); at the same time the computer establishes a Bluetooth connection directly with the e-puck2 robot to control it. |
| | :''Disadvantages'': |
| | :- the Bluetooth standard only allow up to seven simultaneous connections |
| | :- doubled latency (Pi-puck <-> pc and pc <-> robot) |
| | 2) The computer establishes a WiFi connection with both the Pi-puck and the e-puck2 robot. |
| | :''Advantages'': |
| | :- only one connection type needed, easier to handle |
| | :''Disadvantages'': |
| | :- doubled latency (Pi-puck <-> pc and pc <-> robot) |
| | 3) The computer establishes a WiFi connection with the Pi-puck and then the Pi-puck is in charge of controlling the robot via I2C based on the data received from the computer controller. |
| | :''Advantages'': |
| | :- less latency involved |
| | :- less number of connections to handle |
| | :- depending on your algorithm, it would be possible to initially develop the controller on the computer (easier to develop and debug) and then transfer the controller directly to the Pi-puck without the need to change anything related to the control of the robot via I2C |
|
| |
|
| ===User space===
| | The following figure summarizes these 3 options:<br/> |
| ====Static configuration==== | | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/wireless-remote-control-options.png <img width=600 src="https://projects.gctronic.com/epuck2/wiki_images/wireless-remote-control-options.png">]</span> |
| Each of the microprocessor IO pins can be configured to work in different ways for different purposes; in case we desire a certain pin to be configured as a gpio line, we must modify the function assigned to that pin (mux configuration) in the U-Boot board configuration file, that for the Gumstix Overo COM is located at "U-BootSrc/board/overo/overo.h". <!-- you can have a look at it [http://www.sakoman.net/cgi-bin/gitweb.cgi?p=u-boot-omap3.git;a=blob;f=board/overo/overo.h;h=4c7ac27fa6818d4f474bc42330134fd0a5520a37;hb=HEAD here].--> <br/>
| |
|
| |
|
| To know which modes are available for the pins consult the chapter ''7-System Control Module'' (more specifically ''7.4.4-Pad Functional Multiplexing and Configuration'') in the [https://projects.gctronic.com/Gumstix/omap35xx-TRM.pdf OMAP35x TRM]. <br/> | | =How to work with the Pi-puck= |
| | ==Demos and scripts update== |
| | First of all you should update to the last version of the demos and scripts released with the system that you can use to start playing with the Pi-puck extension and the robot.<br/> |
| | To update the repository follow these steps:<br/> |
| | 1. go to the directory <code>/home/pi/Pi-puck</code><br/> |
| | 2. issue the command <code>git pull</code><br/> |
| | Then to update some configurations of the system:<br/> |
| | 1. go to the directory <code>/home/pi/Pi-puck/system</code><br/> |
| | 2. issue the command <code>./update.sh</code>; the system will reboot.<br/> |
| | You can find the Pi-puck repository here [https://github.com/gctronic/Pi-puck https://github.com/gctronic/Pi-puck].<br/> |
|
| |
|
| Assume we want to have the possibility to switch on and off a led attached to the line gpio70; in order to accomplish this task, we need to follow these steps:
| | ==Audio recording== |
| | Use the <code>arecord</code> utility to record audio from the onboard microphone. The following example shows how to record an audio of 2 seconds (<code>-d</code> parameter) and save it to a wav file (<code>test.wav</code>):<br/> |
| | <code>arecord -Dmic_mono -c1 -r16000 -fS32_LE -twav -d2 test.wav</code><br/> |
| | You can also specify a rate of 48 KHz with <code>-r48000</code> |
|
| |
|
| :'''1.''' Modify the board configuration file "overo.h" specifying that the pin has to behave as a gpio line:
| | ==Audio play== |
| <pre> | | Use <code>aplay</code> to play <code>wav</code> files and <code>mplayer</code> to play <code>mp3</code> files. |
| MUX_VAL(CP(DSS_DATA0), (IDIS | PTU | DIS | M4)) /*DSS_DATA0 => GPIO70*/\
| |
| </pre> | |
| :*IDIS = input disable, namely output pin
| |
| :*PTU = pull type up, but could be also PTD (pull type down) because of the third parameter
| |
| :*DIS = disable pull type up/down
| |
| :*M4 = mode 4 (gpio)
| |
| :This give us a GPIO pin that is output and not pulled up or down.
| |
| :'''2.''' Build U-Boot and place the generated ''u-boot.bin'' image in the flash ([http://www.gumstix.org/how-to/70-writing-images-to-flash.html Writing images to onboard nand]) or in a micro sd card ([http://www.gumstix.org/create-a-bootable-microsd-card.html Creating a bootable microSD card])
| |
| :'''3.''' After login, we can see all the GPIO pins that have been exported by the kernel to userspace in the /sys/class/gpio/ directory. In order to access the gpio70 line, we should export it first, by typing:
| |
| <pre> | |
| echo "70" > /sys/class/gpio/export
| |
| </pre> | |
| :Now the following line is active /sys/class/gpio/gpio70.
| |
| :'''4.''' At this point we must configure the direction of the exported line and set a logical value (1 or 0) to that line, we can do that by typing:
| |
| <pre> | |
| echo "high" > /sys/class/gpio/gpio70/direction
| |
| </pre> | |
| :This command set the pin in output and give it a value of 1.
| |
| :'''5.''' Finally we can switch on or off the led, by setting the value of the gpio line:
| |
| <pre> | |
| echo "value" > /sys/class/gpio/gpio70/value
| |
| </pre> | |
| :Where value=1 means switch on, and value=0 means switch off.
| |
|
| |
|
| | ==Battery reading== |
| | An example showing how to measure both the battery of the robot and the battery of the Pi-puck extension is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/battery/</code>.<br/> |
| | The first time you need to change the mode of the script in order to be executable with the command <code>sudo chmod +x read-battery.sh</code>.<br/> |
| | Then you can start reading the batteries value by issueing <code>./read-battery.sh</code>.; this demo will print the batteries values (given in Volts) on the terminal. |
|
| |
|
| In order to automate the process of creating a gpio line accessible through "/sys/class/gpio/", we must modify the board configuration file in the kernel source; this file can be found in "KernelSrc/arch/arm/mach-omap2/board-overo.c" (and related definitions in "KernelSrc/arch/arm/plat-omap/include/mach/board-overo.h"). These files must contain instructions to initialize the gpio line that we want to export in user space and set their direction and initial value. <br/>
| | ==WiFi configuration== |
| Consider the previous example in which we would like to control a led with the gpio70 pin; for this purpose the following instructions must be added in the board configuration file ''board.overo.c'' within the ''overo_init'' function:
| | Specify your network configuration in the file <code>/etc/wpa_supplicant/wpa_supplicant-wlan0.conf</code>.<br/> |
| | Example:<br/> |
| <pre> | | <pre> |
| if ((gpio_request(70, "OVERO_GPIO_DD00") == 0) && (gpio_direction_output(70, 1) == 0)) {
| | ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev |
| gpio_export(70, 0);
| | update_config=1 |
| gpio_set_value(70, 1); //not really needed, the initial output value is set with gpio_direction_output
| | country=CH |
| } else {
| | network={ |
| printk(KERN_ERR "could not obtain gpio for OVERO_GPIO_DD00\n");
| | ssid="MySSID" |
| | psk="9h74as3xWfjd" |
| } | | } |
| </pre> | | </pre> |
| After this modification we need to build the kernel and copy it to the flash or micro sd card, and after login we will have the /sys/class/gpio/gpio70 line automatically active.<br/>
| | You can have more than one <code>network</code> parameter to support more networks. For more information about ''wpa_supplicant'' refer to [https://hostap.epitest.fi/wpa_supplicant/ https://hostap.epitest.fi/wpa_supplicant/]. |
| For more information on the previous snippet code refers to [https://www.kernel.org/doc/Documentation/gpio/gpio.txt "KernelSrc/Documentation/gpio.txt"]. | | |
| | Once the configuration is done, you can also connect to the Pi-puck with <code>SSH</code>. If you are working in Windows you can use [https://www.putty.org/ PuTTY]. |
| | |
| | ===How to know your IP address=== |
| | A simple method to know your IP address is to connect the USB cable to the Pi-puck extension and issue the command <code>ip a</code>; from the command's result you will be able to get you current assigned IP address. |
|
| |
|
| | If you prefer to know your IP address remotely (without connecting any cable) then you can use <code>nmap</code>.<br/> |
| | For example you can search all connected devices in your network with the following command: <code>nmap 192.168.1.*</code>. Beware that you need to specify the subnet based on your network configuration.<br/> |
| | From the command's result you need to look for the hostname <code>raspberrypi</code>.<br/> |
| | If you are working in Windows you can use the [https://nmap.org/zenmap/ Zenmap] application. |
| | |
| | ==File transfer== |
| | ===USB cable=== |
| | You can transfer files via USB cable between the computer and the Pi-puck extension by using on of the <code>zmodem</code> protocol.<br/> |
| | The <code>lrzsz</code> package is pre-installed in the system, thus you can use the <code>sx</code> and <code>rx</code> utilities to respectevely send files to the computer and receive files from the computer.<br/> |
| | Example of sending a file to the computer using the <code>Minicom</code> terminal program:<br/> |
| | 1. in the Pi-puck console type <code>sx --zmodem fliename.ext</code>. The transfer should start automatically and you'll find the file in the home directory.<br/> |
| | <!--2. to start the transfer type the sequence <code>CTRL+A+R</code>, then chose <code>xmodem</code> and finally enter the name you want to assign to the received file. You'll find the file in the home directory.<br/>--> |
| | Example of receiving a file from the computer using the <code>Minicom</code> terminal program:<br/> |
| | 1. in the Pi-puck console type <code>rx -Z</code><br/> |
| | 2. to start the transfer type the sequence <code>CTRL+A+S</code>, then chose <code>zmodem</code> and select the file you want to send with the <code>spacebar</code>. Finally press <code>enter</code> to start the transfer.<br/> |
| | ===WiFi=== |
| | The Pi-puck extension supports <code>SSH</code> connections.<br/> |
| | To exchange files between the Pi-puck and the computer, the <code>scp</code> tool (secure copy) can be used. An example of transferring a file from the Pi-puck to the computer is the following:<br/> |
| | <code>scp pi@192.168.1.20:/home/pi/example.txt example.txt</code> |
| | |
| | If you are working in Windows you can use [https://www.putty.org/ PuTTY]. |
| | |
| | ==Image streaming== |
| | |
| | |
| | ==Bluetooth LE== |
| | An example of a ''BLE uart service'' is available in the Pi-puck repository; you can find it in the directory <code>/home/pi/Pi-puck/ble/</code>.<br/> |
| | To start the service you need to type: <code>python uart_peripheral.py</code>.<br/> |
| | Then you can use the ''e-puck2-android-ble app'' you can find in chapter [https://www.gctronic.com/doc/index.php?title=e-puck2_mobile_phone_development#Connecting_to_the_BLE Connecting to the BLE] in order to connect to the Pi-puck extension via BLE. Once connected you'll receive some dummy data for the proximity values and by clicking on the motion buttons you'll see the related action printed on the Pi-puck side. This is a starting point that you can extend based on your needs. |
| | |
| | =Operating system= |
| | The system is based on Raspbian Stretch and can be downloaded from the following link [https://projects.gctronic.com/epuck2/PiPuck/pi-puck-os_16.12.19.zip pi-puck-os_16.12.19.zip]. |
| | |
| | When booting the first time, the first thing to do is expanding the file system in order to use all the available space on the micro sd:<br/> |
| | 1. <code>sudo raspi-config</code><br/> |
| | 2. Select <code>Advanced Options</code> and then <code>Expand Filesystem</code><br/> |
| | 3. reboot |
| | |
| | ==e-puck2 camera configuration== |
| | The e-puck2 camera need to be configured through I2C before it can be used. For this reason a Python script is called at boot that detects and configures the camera. The script resides in the Pi-puck repository installed in the system (<code>/home/pi/Pi-puck/camera-configuration.py</code>), so beware to not remove it. |
| | |
| | If the robot is plugged after the boot process is completed, you need to call manually the Python configuration script before using the camera by issueing the command <code>python3 /home/pi/Pi-puck/camera-configuration.py</code>. |
| | |
| | In order to automatically run the script at boot, the <code>/etc/rc.local</code> was modified by adding the call to the script just before the end of the file. |
| | |
| | ==Power button handling== |
| | The power button press is handled by a background service (<code>systemd</code>) started automatically at boot. The service description file is located in <code>/etc/systemd/system/power_handling.service</code> and it calls the <code>/home/pi/power-handling/</code> program. Beware to not remove neither of these files.<br/> |
| | The source code of the power button handling program is available in the Pi-puck repository and is located in <code>/home/pi/Pi-puck/power-handling/power-handling.c</code>. |
| | |
| | ==Desktop mode== |
| | The system starts in console mode, to switch to desktop (LXDE) mode issue the command <code>startx</code>. |
| | ===Camera viewer=== |
| | A camera viewer called <code>luvcview</code> is installed in the system. You can open a terminal and issue simply the command <code>luvcview</code> to see the image coming from the robot camera. |
| | |
| | ==VNC== |
| | [https://www.realvnc.com/en/ VNC] is a remote control desktop application that lets you connect to the Pi-puck from your computer and then you will see the desktop of the Pi-puck inside a window on your computer. You'll be able to control it as though you were working on the Pi-puck itself.<br/> |
| | VNC is installed in the system and the ''VNC server'' is automatically started at boot, thus you can connect with ''VNC Viewer'' from your computer by knowing the IP address of the Pi-puck (refer to section [https://www.gctronic.com/doc/index.php?title=Pi-puck#How_to_know_your_IP_address How to know your IP address]).<br/> |
| | Notice that the ''VNC server'' is started also in console mode. |
| | |
| | ==I2C communication== |
| | The communication between the Pi-puck extension and the robot is based on I2C. The system is configured to exploit the I2C hardware peripheral in order to save CPU usage, but if you need to use the software I2C you can enable it by modifying the <code>/boot/config.txt</code> file and removing the <code>#</code> symbol (comment) in front of the line with the text <code>dtparam=soft_i2c</code> (it is placed towards the end of the file). |
| | |
| | ==Audio output configuration== |
| | You can enable or disable audio output by modifying the <code>config.txt</code> file in the <code>boot</code> partition.<br/> |
| | To enable audio output insert the line: <code>gpio=22=op,dh</code><br/> |
| | To disable audio output insert the line: <code>gpio=22=op,dl</code><br/> |
| | If you don't need to play audio files it is suggested to disable audio output in order to save power. |
| | |
| | =ROS= |
| | ROS Kinetic is integrated in the Pi-puck system.<br/> |
| | A ROS node developed to run in the Pi-puck is available for both <code>CPP</code> and <code>Python</code>, the communication system is based on the third architecture shown in chapter [https://www.gctronic.com/doc/index.php?title=Pi-puck#Wireless_remote_control Wireless remote control]; a more detailed schema is shown below:<br/> |
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/epuck2-ros-schema.png <img width=600 src="https://projects.gctronic.com/epuck2/wiki_images/epuck2-ros-schema.png">]</span> |
| | |
| | ==Initial configuration== |
| | The ROS workspace is located in <code>~/rosbots_catkin_ws/</code><br/> |
| | The e-puck2 ROS driver is located in <code>~/rosbots_catkin_ws/src/epuck_driver_cpp/</code><br/> |
| | Remember to follow the steps in the section [http://www.gctronic.com/doc/index.php?title=Pi-puck#Requirements Requirements ] and section [https://www.gctronic.com/doc/index.php?title=Pi-puck#Demos_and_scripts_update Demos and scripts update], only once.<br/> |
| | The PC (if used) and the Pi-puck extension are supposed to be configured in the same network. |
| | |
| | ==Running roscore== |
| | <code>roscore</code> can be launched either from the PC or directly from the Pi-puck.<br/> |
| | Before starting roscore, open a terminal and issue the following commands: |
| | * <code>export ROS_IP=roscore-ip</code> |
| | * <code>export ROS_MASTER_URI=http://roscore-ip:11311</code> |
| | where <code>roscore-ip</code> is the IP of the machine that runs <code>roscore</code><br/> |
| | Then start <code>roscore</code> by issueing <code>roscore</code>. |
| | |
| | ==Running the ROS node== |
| | Before starting the e-puck2 ROS node on the Pi-puck, issue the following commands: |
| | * <code>export ROS_IP=pipuck-ip</code> |
| | * <code>export ROS_MASTER_URI=http://roscore-ip:11311</code> |
| | where <code>pipuck-ip</code> is the IP of the Pi-puck extension and <code>roscore-ip</code> is the IP of the machine that runs <code>roscore</code> (can be the same IP if <code>roscore</code> runs directly on the Pi-puck). |
| | |
| | To start the e-puck2 ROS node issue the command:<br/> |
| | <code>roslaunch epuck_driver_cpp epuck_minimal.launch debug_en:=true ros_rate:=20</code><br/> |
| <!-- | | <!-- |
| Read a value
| | To start the e-puck2 ROS node issue the command:<br/> |
| Set a pin in input
| | <code>roslaunch epuck_driver_cpp epuck_controller.launch epuck_id:='3000'</code><br/> |
| | This launch file will start the e-puck2 node and the camera node. |
| | If you are using a PC, then you can start <code>rviz</code>: |
| | * in a terminal issue the command <code>rviz rviz</code> |
| | * open the configuration file named <code>single_epuck_driver_rviz.rviz</code> you can find in <code>epuck_driver_cpp/config/</code> directory |
| --> | | --> |
|
| |
|
| ====Dynamic configuration====
| | The following graph shows all the topics published by the e-puck2 driver node:<br/> |
| If you aren't familiar with modifying and building U-Boot and kernel, you would probably choose to modify the pin configuration at runtime, without the need to touch any board configuration file. The only way to change the configuration of the pins is to access directly the physical memory of the microprocessor, in particular its configuration registers. <br/>
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/ros-e-puck2_.jpg <img width=150 src="https://projects.gctronic.com/epuck2/wiki_images/ros-e-puck2_small.jpg">]</span> |
| The utility [http://buildroot.uclibc.org/downloads/sources/devmem2.c devmem2] allows for easy reading and writing of the memory; after building and installing this utility on the Gumstix Overo COM, you are ready to change the ports functionality. Consider the previous example of the led on gpio70, to change the pin mode to gpio you must issue the following command:
| | ''<font size="2">Click to enlarge</font>'' |
| <pre>
| | |
| devmem2 0x480020DC b 0x14
| | ==Get the source code== |
| </pre> | | The last version of the e-puck2 ROS node can be downloaded from the git: <code>git clone -b pi-puck https://github.com/gctronic/epuck_driver_cpp.git</code><br/> |
| ''0x480020DC'' is the address of the register we want to write to and can be found observing the table 7-4 on chapter 7.4.4.3 of the [https://projects.gctronic.com/Gumstix/omap35xx-TRM.pdf OMAP35x TRM]; ''b'' means we want to write a byte to that register and finally ''0x14'' is the value we want to write. The pin mode depends on the last three bits, in this case the mode is set to 4, namely the pin is a gpio. From now on we can follow steps from 3 to 5 of the previous chapter to switch on and off the led. | | |
| | To update to the last version follow these steps: |
| | # <code>cd ~/rosbots_catkin_ws/src/</code> |
| | # <code>rm -R -f epuck_driver_cpp</code> |
| | # <code>git clone -b pi-puck https://github.com/gctronic/epuck_driver_cpp.git</code> |
| | # <code>cd ~/rosbots_catkin_ws/</code> |
| | # <code>catkin_make --pkg epuck_driver_cpp</code> |
|
| |
|
| An example on modifying the pins configuration through the C programming language can be found in the following link [http://docwiki.gumstix.org/index.php?title=Sample_code/C/gpregs gpregs.c].
| | ==Python version== |
| | A Python version developed by the York University can be found here [https://github.com/yorkrobotlab/pi-puck-ros https://github.com/yorkrobotlab/pi-puck-ros]. |
|
| |
|
| ===Useful links/resources=== | | =OpenCV= |
| For more information on GPIO usage, have a look at the following links:
| | OpenCV 3.4.1 is integrated in the Pi-puck system. |
| * [https://www.kernel.org/doc/Documentation/gpio/gpio.txt "KernelSrc/Documentation/gpio.txt"]
| |
| * [http://sourceforge.net/p/gumstix/mailman/ gumstix mailing list]
| |
| * [http://wiki.gumstix.org/index.php?title=GPIO http://wiki.gumstix.org/index.php?title=GPIO]
| |
| * [http://www.avrfreaks.net/wiki/index.php/Documentation:Linux/GPIO http://www.avrfreaks.net/wiki/index.php/Documentation:Linux/GPIO]
| |
| * [http://www.hy-research.com/omap3_pinmux.html http://www.hy-research.com/omap3_pinmux.html]
| |
| * [http://focus.ti.com/docs/prod/folders/print/omap3530.html http://focus.ti.com/docs/prod/folders/print/omap3530.html]
| |
| * [http://pixhawk.ethz.ch/omap/start http://pixhawk.ethz.ch/omap/start]
| |
| * [http://docs.blackfin.uclinux.org/doku.php?id=gpio http://docs.blackfin.uclinux.org/doku.php?id=gpio]
| |
|
| |
|
| <!--
| | =York Robotics Lab Expansion Board= |
| ==U-Boot==
| | The York Robotics Lab developed an expansion board for the Pi-puck extension that includes: 9-DoF IMU, 5-input navigation switch, RGB LED, XBee socket, 24-pin Raspberry Pi compatible header. For more information have a look at [https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/ https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/].<br/> |
| You can find the U-Boot source at "git://gitorious.org/u-boot-omap3/mainline.git" or "http://git.gitorious.org/u-boot-omap3/mainline.git".
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/yrl-expansion-top.jpg <img width=350 src="https://projects.gctronic.com/epuck2/wiki_images/yrl-expansion-top.jpg">]</span><br/> |
| --> | |
|
| |
|
| =Webots interface=
| | An example showing how to communicate with the YRL expansion board is available in the Pi-puck repository of the York Robotics Lab: |
| Nikola Velickovic developed an interface with the Webots simulator during his MSc Thesis in 2012.
| | # <code> git clone https://github.com/yorkrobotlab/pi-puck.git pi-puck_yrl</code> |
| His report is available [https://projects.gctronic.com/Gumstix/MScThesis_NikolaVelickovic_2012.tar.gz here].
| | # <code>cd pi-puck_yrl/python-library</code> |
| His files are available [https://projects.gctronic.com/Gumstix/ThesisProjectFiles(30.12.2011).tar.gz here].
| | # <code>python3 pipuck-library-test.py -x</code> Once started, press in sequence up, down, left, right, center to continue the demo. |
|
| |
|
| =FAQ= | | ==Assembly== |
| '''1. Why the serial communication between Gumstix Overo COM and the robot doesn't work?''' <br/>
| | The assembly is very simple: place the YRL expansion board on top of the Raspberry Pi and then connect them with the provided screws. Once they are connected, you can attach both on top of the Pi-puck extension.<br/> |
| There could be three possible reasons for the communication problem:
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/yrl-exp1.jpg <img width=200 src="https://projects.gctronic.com/epuck2/wiki_images/yrl-exp1.jpg">]</span> |
| * selector position incorrect: you need to be sure that the robot selector is in position 10 in order to start the right software on the robot side
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/yrl-exp2.jpg <img width=150 src="https://projects.gctronic.com/epuck2/wiki_images/yrl-exp2.jpg">]</span> |
| * wrong device: the serial device is identified as /dev/ttyS0 in the linux machine, be sure to use it when you're using for example the sertest demo ("./sertest -p /dev/ttyS0 -b 230400")
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/yrl-exp3.jpg <img width=200 src="https://projects.gctronic.com/epuck2/wiki_images/yrl-exp3.jpg">]</span><br/> |
| * battery discharged: somebody could be deceived from the fact that the linux console is still usable, but if the orange led on the robot indicating the low battery level is turned on, then the robot will not be able anymore to respond, even if you are working on the linux console; either change or charge your battery and try again. <br/>
| | ==XBee== |
| | In this section it is explained how to send data from the Pi-puck to the computer using XBee modules Series 1. |
|
| |
|
| '''2. I am able to communicate with the robot through the serial line, but seems that I receive only garbage, why?''' <br/>
| | The XBee module mounted on the YRL expansion must be programmed with the <code>XBEE 802.15.4-USB ADAPTER</code> firmware; this can be done with the [http://www.digi.com/products/wireless-wired-embedded-solutions/zigbee-rf-modules/xctu XTCU software]. With XTCU be sure to program also the same parameters on both modules in order to be able to communicate between each other: <code>Channel</code> (e.g. <code>C</code>), <code>PAN ID</code> (e.g. <code>3332</code>), <code>DH = 0</code>, <code>DL = 0</code>, <code>MY = 0</code>. |
| Probably the baudrate isn't correct; with the robot selector in position 10 you need to configure the baudrate at 230400 (e.g "./sertest -p /dev/ttyS0 -b 230400"). <br/>
| |
|
| |
|
| '''3. Can I use bluetooth to connect to the robot? Can I use the [http://www.gctronic.com/doc/index.php/E-Puck#PC_interface monitor]?''' <br/>
| | Some Python examples ara available in the [https://github.com/yorkrobotlab/pi-puck-expansion-board YRL Expansion Board GitHub repository] that can be used to communicate with the XBee module mounted on the YRL expansion. These examples are based on the [https://github.com/digidotcom/xbee-python Digi XBee Python library] that can be installed with the command <code>pip3 install digi-xbee</code>. This library requires the XBee module to be configured in API mode; you can setup this mode following these steps: |
| Yes, you can connect to the robot with bluetooth and play with the monitor interface placing the selector in position 3. You'll experience some errors on the values displayed on the monitor due to the additional two long IR sensors that aren't considered when the interface was developed; moreover you will not be able to receive images from the robot. <br/>
| | # <code> git clone https://github.com/yorkrobotlab/pi-puck-expansion-board.git</code> |
| | # <code>cd pi-puck-expansion-board/xbee</code> |
| | # <code>python3 xbee-enable-api-mode.py</code> |
|
| |
|
| '''4. Why I cannot connect to the robot through SSH? <br/>
| | Now connect the second module to the computer and run XTCU, select the console view and open the serial connection. Then run the [https://projects.gctronic.com/epuck2/PiPuck/xbee-send-broadcast.py xbee-send-broadcast.py] example from the Pi-puck by issuing the command: <code>python3 xbee-send-broadcast.py</code>. From the XTCU console you should receive <code>Hello Xbee World!</code>. |
| * first of all be sure that the network is well configured (you can i.e. ping the robot sucessfully)
| |
| * check the SSH daemon is running typing: ''ps -ef | grep sshd''; if it is not running then setup the SSH daemon to run automatically at boot; for this purpose you can type ''update-rc.d sshd defaults 99''. This command will install the links to ''sshd'' into rc*.d dirs. See the man page for more informations.
| |
| * if the SSH server is running, but you get an error like "ssh: connect to host 192.168.1.2 port 22: Connection refused" when trying to connect, you can check whether a user and group sshd are created. If not, add the following entries in the system:
| |
| <pre> | |
| /etc/group:sshd:*:27:
| |
| /etc/passwd:sshd:*:27:27:sshd privsep:/var/empty:/sbin/nologin
| |
| </pre> | |
|
| |
|
| '''5. How to auto-login and execute applications automatically at startup? <br/>
| | For more information refer to [https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/xbee/ https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/xbee/]. |
| Refers to the instructions explained here [https://wiki.gumstix.com/index.php/AutoLogin https://wiki.gumstix.com/index.php/AutoLogin].
| |
|
| |
|
| '''6. Are micro SDHC supported? <br/>
| | =Time-of-Flight Distance Sensor add-on= |
| Yes they are supported.
| | The Pi-puck extension integrates six sensor board sockets that can be used to add up to six VL53L1X-based distance sensor add-ons. The Pi-puck equipped with these add-ons is shown in the following figure:<br/> |
| | <span class="plainlinks">[https://projects.gctronic.com/epuck2/wiki_images/pi-puck-tof.jpg <img width=250 src="https://projects.gctronic.com/epuck2/wiki_images/pi-puck-tof.jpg">]</span><br/> |
| | For more information have a look at [https://pi-puck.readthedocs.io/en/latest/extensions/tof-sensor/#time-of-flight-distance-sensor https://pi-puck.readthedocs.io/en/latest/extensions/tof-sensor/#time-of-flight-distance-sensor]. |
|
| |
|
| =Videos= | | <font style="color:red"> Beware that once the socket for the ToF add-on sensor '''3''' is soldered on the pi-puck extension, you are no more able to connect the HDMI cable.</font> |
| <!--{{#ev:youtube|LQC9lvn9w8Q}}
| |
| Comments:
| |
| We have sent an e-puck on a mission to find our office plant.
| |
| It's actually a standard e-puck with a wifi connection to the laptop and the Gumstix's overo extention with Linux OS, all runned by a powerful 0.6 Ghz processor. -->
| |
|
| |
|
| {{#ev:youtube|a0Ozy-oRQIs}} <br/>
| | ==Communicate with the ToF sensors== |
| Comments: This e-puck is on an exploration, his camera sends continuous image to the computer with a wifi connection.
| | In order to communicate with the sensors you can use the <code>multiple-i2c-bus-support</code> branch of the [https://github.com/pimoroni/vl53l1x-python vl53l1x-python] library from [https://shop.pimoroni.com/ Pimoroni]. To install this library follow these steps: |
| | # <code>git clone -b multiple-i2c-bus-support https://github.com/pimoroni/vl53l1x-python.git</code> |
| | # <code>cd vl53l1x-python</code> |
| | # <code>sudo python3 setup.py install</code> |
|
| |
|
| =Useful links=
| | A Python example showing how to read data from the ToF sensors is available in the Pi-puck repository of the York Robotics Lab: |
| [http://www.gumstix.org/ http://www.gumstix.org/] <br/>
| | # <code> git clone https://github.com/yorkrobotlab/pi-puck.git pi-puck_yrl</code> |
| [http://wiki.gumstix.org/index.php?title=Main_Page http://wiki.gumstix.org/index.php?title=Main_Page] <br/>
| | # <code>cd pi-puck_yrl/python-library</code> |
| [http://docwiki.gumstix.org/index.php/Gumstix_Buildroot_Support_Wiki http://docwiki.gumstix.org/index.php/Gumstix_Buildroot_Support_Wiki] <br/>
| | # <code>python3 pipuck-library-test.py -t</code> |
| [http://docwiki.gumstix.org/index.php?title=U-Boot http://docwiki.gumstix.org/index.php?title=U-Boot] <br/>
| |
| [http://www.openembedded.org/wiki/Main_Page http://www.openembedded.org/wiki/Main_Page] <br/>
| |
| [http://www.e-puck.org/ http://www.e-puck.org/] <br/>
| |
| [http://www.jumpnowtek.com/ http://www.jumpnowtek.com/] <br/>
| |
1 Hardware
1.1 Overview
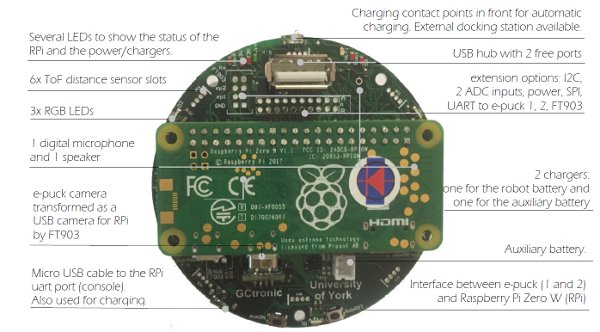
Features:
- Raspberry Pi zero W (rPi) connected to the robot via I2C
- interface between the robot base camera and the rPi via USB, up to 15 FPS
- 1 digital microphone and 1 speaker
- USB hub connected to the rPi with 2 free ports
- uUSB cable to the rPi uart port. Also ok for charging
- 2 chargers. 1 for the robot battery and 1 for the auxiliary battery on top of the extension
- charging contact points in front for automatic charging. External docking station available
- several extension options. 6 i2C channels, 2 ADC inputs
- several LED to show the status of the rPi and the power/chargers
1.2 I2C bus
I2C is used to let communicate various elements present in the robot, Pi-puck and extensions. An overall schema is shown in the following figure:

An I2C switcher is included in the Pi-puck extension in order to support additional I2C buses (the RPi alone has only one usable I2C bus). These are needed to avoid conflicts between Time-of-Flight sensors that have a fixed I2C address.
2 Getting started
This introductory section explains the minimal procedures needed to work with the Raspberry Pi Zero W mounted on the Pi-puck extension board and gives a general overview of the available basic demos and scripts shipped with the system flashed on the micro SD. More advanced demos are described in the following separate sections (e.g. ROS), but the steps documented here are fundamental, so be sure to fully understand them.
The extension is mostly an interface between the e-puck robot and the Raspberry Pi, so you can exploit the computational power of a Linux machine to extend the robot capabilities.
In most cases, the Pi-puck extension will be attached to the robot, but it's interesting to note that it can be used also alone when the interaction with the robot isn't required.
The following sections assume the full configuration (robot + extension), unless otherwise stated.
2.1 Requirements
The robot must be programmed with a special firmware in order to communicate via I2C bus with the Raspberry Pi mounted on the Pi-puck extension. The same I2C bus is shared by all the devices (camera, IMU, distance sensor, others extensions), the main microcontroller and the Raspberry Pi. Since the Raspberry Pi acts as I2C master, these devices will not be anymore reachable directly from the robot main microcontroller that will act instead as I2C slave.
2.1.1 e-puck1
The e-puck1 robot must be programmed with the following firmware pi-puck-e-puck1.hex.
2.1.2 e-puck2
The e-puck2 robot must be programmed with the following firmware e-puck2_main-processor_extension.elf (07.06.19) and the selector must be placed in position 10.
The source code is available in the gumstix branch of the repo https://github.com/e-puck2/e-puck2_main-processor.
2.2 Turn on/off the extension
To turn on the extension you need to press the auxON button as shown in the follwoing figure; this will turn on also the robot (if not already turned on). Similarly, if you turn on the robot then also the extension will turn on automatically.
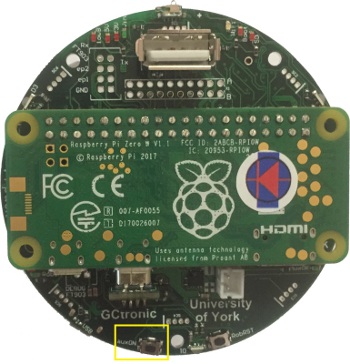
To turn off the Pi-puck you need to press and hold the auxON button for 2 seconds; this will initiate the power down procedure.
Beware that by turning off the robot, the extension will not be turned off automatically if it is powered from another source like the micro usb cable or a secondary battery. You need to use its power off button to switch it off. Instead if there is no other power source, then by turning off the robot also the extension will be turned off (not cleanly).
2.3 Console mode
The Pi-puck extension board comes with a pre-configured system ready to run without any additional configuration.
In order to access the system from a PC in console mode, the following steps must be performed:
1. connect a micro USB cable from the PC to the extension module. If needed, the drivers are available in the following link USB to UART bridge drivers
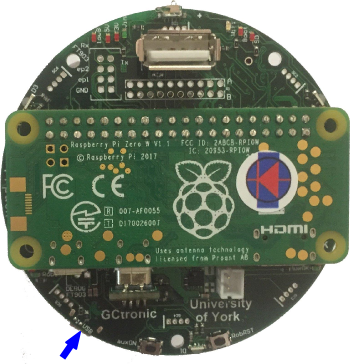
2. execute a terminal program and configure the connection with 115200-8N1 (no flow control). The serial device is the one created when the extension is connected to the computer
3. switch on the robot (the extension will turn on automatically); now the terminal should display the Raspberry Pi booting information. If the robot isn't present, then you can directly power on the extension board with the related button
4. login with user = pi, password = raspberry
2.4 Battery charge
You can either charge the robot battery or the additional battery connected to the Pi-puck extension or both the batteries by simply plugging the micro USB cable.
The following figure shows the connector for the additional battery.
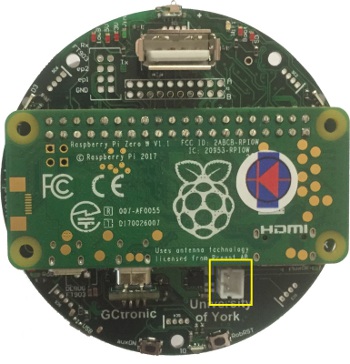
The robot can also autonomously charge itself if the charging wall is available. The Pi-puck extension includes two spring contacts on the front side that let the robot easily make contact with the charging wall and charge itself. The charging wall and the spring contacts are shown in the following figures:
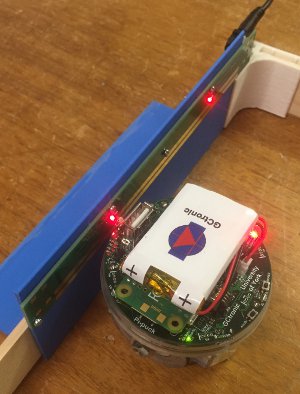
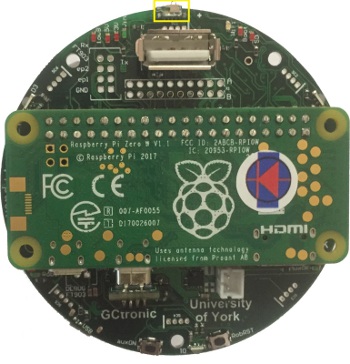
2.5 Reset button
A button is available to reset the robot, when pressed it will resets only the robot restarting its firmware. This is useful for instance during development or for specific demos in which a restart of the robot is needed. In these cases you don't need to turn off completely the robot (and consequently also the Pi-puck if energy is supplied by the robot) but instead you can simply reset the robot. The position of the reset button is shown in the following figure:
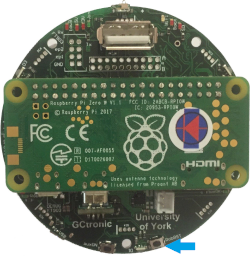
3 How to communicate with the robot and its sensors
3.1 Communicate with the e-puck1
Refer to the repo https://github.com/yorkrobotlab/pi-puck-e-puck1.
3.2 Communicate with the e-puck2
An example showing how to exchange data between the robot and the Pi-puck extension is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/e-puck2/.
You can build the program with the command gcc e-puck2_test.c -o e-puck2_test.
Now you can run the program by issueing ./e-puck2_test; this demo will print the sensors data on the terminal and send some commands to the robot at 2 Hz.
The same example is also available in Python, you can run it by issueing python3 e-puck2_test.py.
3.2.1 Packet format
Extension to robot packet format, 20 bytes payload (the number in the parenthesis represents the bytes for each field):
| Left speed (2)
|
Right speed (2)
|
Speaker (1)
|
LED1, LED3, LED5, LED7 (1)
|
LED2 RGB (3)
|
LED4 RGB (3)
|
LED6 RGB (3)
|
LED8 RGB (3)
|
Settings (1)
|
Checksum (1)
|
- Left, right speed: [-2000 ... 2000]
- Speaker: sound id = [0, 1, 2]
- LEDs on/off flag: bit0 for LED1, bit1 for LED3, bit2 for LED5, bit3 for LED7
- RGB LEDs: [0 (off) ... 100 (max)]
- Settings:
- bit0: 1=calibrate IR proximity sensors
- bit1: 0=disable onboard obstacle avoidance; 1=enable onboard obstacle avoidance (not implemented yet)
- bit2: 0=set motors speed; 1=set motors steps (position)
- Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..18)
Robot to extension packet format, 47 bytes payload (the number in the parenthesis represents the bytes for each field):
| 8 x Prox (16)
|
8 x Ambient (16)
|
4 x Mic (8)
|
Selector + button (1)
|
Left steps (2)
|
Right steps (2)
|
TV remote (1)
|
Checksum
|
- Selector + button: selector values represented by 4 least significant bits (bit0, bit1, bit2, bit3); button state is in bit4 (1=pressed, 0=not pressed)
- Checksum: Longitudinal Redundancy Check (XOR of the bytes 0..45)
3.3 Communicate with the IMU
3.3.1 e-puck1
An example written in C showing how to read data from the IMU (LSM330) mounted on e-puck 1.3 is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/e-puck1/.
You can build the program with the command gcc e-puck1_imu.c -o e-puck1_imu.
Now you can run the program by issueing ./e-puck1_imu and then choose whether to get data from the accelerometer or gyroscope; this demo will print the sensors data on the terminal.
3.3.2 e-puck2
An example showing how to read data from the IMU (MPU-9250) is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/e-puck2/.
You can build the program with the command gcc e-puck2_imu.c -o e-puck2_imu.
Now you can run the program by issueing ./e-puck2_imu and then choose whether to get data from the accelerometer or gyroscope; this demo will print the sensors data on the terminal.
The same example is also available in Python, you can run it by issueing python3 e-puck2_imu.py.
3.4 Communicate with the ToF sensor
The Time of Flight sensor is available only on the e-puck2 robot.
First of all you need to verify that the VL53L0X Python package is installed with the following command: python3 -c "import VL53L0X". If the command returns nothing you're ready to go, otherwise if you receive an ImportError then you need to install the package with the command: pip3 install git+https://github.com/gctronic/VL53L0X_rasp_python.
A Python example showing how to read data from the ToF sensor is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/e-puck2/.
You can run the example by issueing python3 VL53L0X_example.py (this is the example that you can find in the repository https://github.com/gctronic/VL53L0X_rasp_python/tree/master/python).
3.5 Capture an image
The robot camera is connected to the Pi-puck extension as a USB camera, so you can access it very easily.
An example showing how to capture an image from the robot's camera using OpenCV is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/snapshot/.
You can build the program with the command g++ $(pkg-config --libs --cflags opencv) -ljpeg -o snapshot snapshot.cpp.
Now you can run the program by issueing ./snapshot; this will save a VGA image (JPEG) named image01.jpg to disk.
The program can accept the following parameters:
-d DEVICE_ID to specify the input video device from which to capture an image, by default is 0 (/dev/video0). This is useful when working also with the Omnivision V3 extension that crates another video device; in this case you need to specify -d 1 to capture from the robot camera.
-n NUM to specify how many images to capture (1-99), by default is 1
-v to enable verbose mode (print some debug information)
Beware that in this demo the acquisition rate is fixed to 5 Hz, but the camera supports up to 15 FPS.
The same example is also available in Python, you can run it by issueing python3 snapshot.py.
3.6 Communicate with the ground sensors extension
Both e-puck1 and e-puck2 support the ground sensors extension.
This extension is attached to the I2C bus and can be read directly from the Pi-puck.
An example written in C showing how to read data from the ground sensors extension is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/ground-sensor/.
You can build the program with the command gcc groundsensor.c -o groundsensor.
Now you can run the program by issueing ./groundsensor; this demo will print the sensors data on the terminal.
The same example is also available in Python, you can run it by issueing python3 groundsensor.py.
3.7 Communicate with the range and bearing extension
Both e-puck1 and e-puck2 support the range and bearing extension.
This extension is attached to the I2C bus and can be read directly from the Pi-puck.
An example written in C showing how to start playing with the range and bearing extension is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/randb/. You need two boards: one is the transmitter (run randb_tx) and the other is the receiver (run randb_rx). The receiver will print the data received from the transmitter.
You can build the programs with the command gcc randb_tx.c -o randb_tx and gcc randb_rx.c -o randb_rx.
The same example is also available in Python, you can run it by issueing python3 randb_tx.py and python3 randb_rx.py.
3.8 Wireless remote control
If you want to control the robot from a computer, for instance when you have an algorithm that requires heavy processing not suitable for the Pi-puck or when the computer acts as a master controlling a fleet of robots that return some information to the controller, then you have 3 options:
1) The computer establishes a WiFi connection with the Pi-puck to receive data processed by the Pi-puck (e.g. results of an image processing task); at the same time the computer establishes a Bluetooth connection directly with the e-puck2 robot to control it.
- Disadvantages:
- - the Bluetooth standard only allow up to seven simultaneous connections
- - doubled latency (Pi-puck <-> pc and pc <-> robot)
2) The computer establishes a WiFi connection with both the Pi-puck and the e-puck2 robot.
- Advantages:
- - only one connection type needed, easier to handle
- Disadvantages:
- - doubled latency (Pi-puck <-> pc and pc <-> robot)
3) The computer establishes a WiFi connection with the Pi-puck and then the Pi-puck is in charge of controlling the robot via I2C based on the data received from the computer controller.
- Advantages:
- - less latency involved
- - less number of connections to handle
- - depending on your algorithm, it would be possible to initially develop the controller on the computer (easier to develop and debug) and then transfer the controller directly to the Pi-puck without the need to change anything related to the control of the robot via I2C
The following figure summarizes these 3 options:
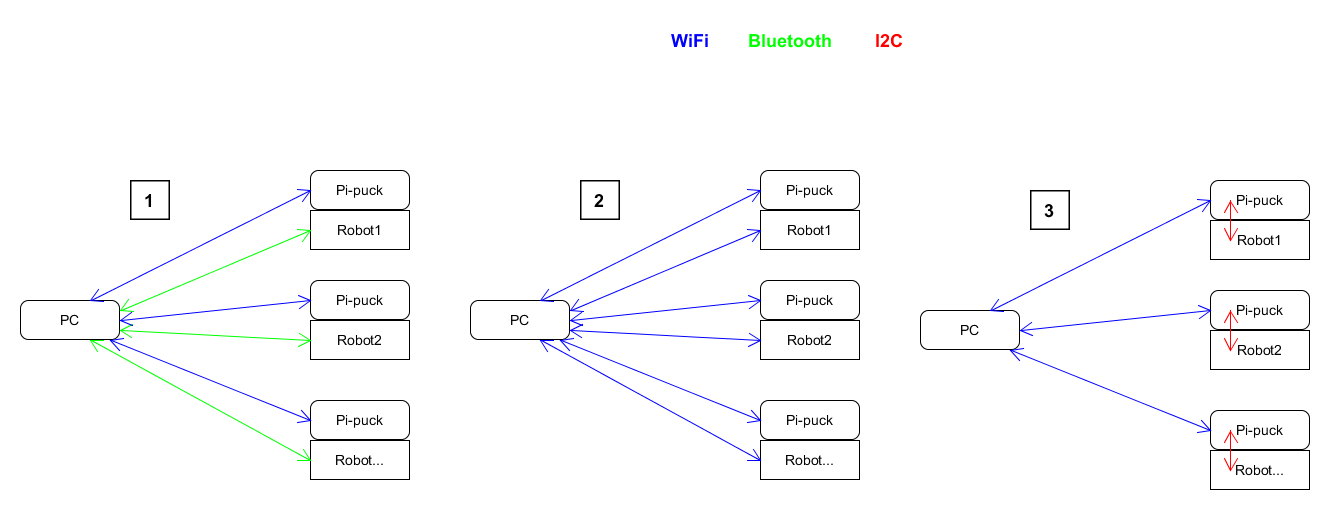
4 How to work with the Pi-puck
4.1 Demos and scripts update
First of all you should update to the last version of the demos and scripts released with the system that you can use to start playing with the Pi-puck extension and the robot.
To update the repository follow these steps:
1. go to the directory /home/pi/Pi-puck
2. issue the command git pull
Then to update some configurations of the system:
1. go to the directory /home/pi/Pi-puck/system
2. issue the command ./update.sh; the system will reboot.
You can find the Pi-puck repository here https://github.com/gctronic/Pi-puck.
4.2 Audio recording
Use the arecord utility to record audio from the onboard microphone. The following example shows how to record an audio of 2 seconds (-d parameter) and save it to a wav file (test.wav):
arecord -Dmic_mono -c1 -r16000 -fS32_LE -twav -d2 test.wav
You can also specify a rate of 48 KHz with -r48000
4.3 Audio play
Use aplay to play wav files and mplayer to play mp3 files.
4.4 Battery reading
An example showing how to measure both the battery of the robot and the battery of the Pi-puck extension is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/battery/.
The first time you need to change the mode of the script in order to be executable with the command sudo chmod +x read-battery.sh.
Then you can start reading the batteries value by issueing ./read-battery.sh.; this demo will print the batteries values (given in Volts) on the terminal.
4.5 WiFi configuration
Specify your network configuration in the file /etc/wpa_supplicant/wpa_supplicant-wlan0.conf.
Example:
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
country=CH
network={
ssid="MySSID"
psk="9h74as3xWfjd"
}
You can have more than one network parameter to support more networks. For more information about wpa_supplicant refer to https://hostap.epitest.fi/wpa_supplicant/.
Once the configuration is done, you can also connect to the Pi-puck with SSH. If you are working in Windows you can use PuTTY.
4.5.1 How to know your IP address
A simple method to know your IP address is to connect the USB cable to the Pi-puck extension and issue the command ip a; from the command's result you will be able to get you current assigned IP address.
If you prefer to know your IP address remotely (without connecting any cable) then you can use nmap.
For example you can search all connected devices in your network with the following command: nmap 192.168.1.*. Beware that you need to specify the subnet based on your network configuration.
From the command's result you need to look for the hostname raspberrypi.
If you are working in Windows you can use the Zenmap application.
4.6 File transfer
4.6.1 USB cable
You can transfer files via USB cable between the computer and the Pi-puck extension by using on of the zmodem protocol.
The lrzsz package is pre-installed in the system, thus you can use the sx and rx utilities to respectevely send files to the computer and receive files from the computer.
Example of sending a file to the computer using the Minicom terminal program:
1. in the Pi-puck console type sx --zmodem fliename.ext. The transfer should start automatically and you'll find the file in the home directory.
Example of receiving a file from the computer using the Minicom terminal program:
1. in the Pi-puck console type rx -Z
2. to start the transfer type the sequence CTRL+A+S, then chose zmodem and select the file you want to send with the spacebar. Finally press enter to start the transfer.
4.6.2 WiFi
The Pi-puck extension supports SSH connections.
To exchange files between the Pi-puck and the computer, the scp tool (secure copy) can be used. An example of transferring a file from the Pi-puck to the computer is the following:
scp pi@192.168.1.20:/home/pi/example.txt example.txt
If you are working in Windows you can use PuTTY.
4.7 Image streaming
4.8 Bluetooth LE
An example of a BLE uart service is available in the Pi-puck repository; you can find it in the directory /home/pi/Pi-puck/ble/.
To start the service you need to type: python uart_peripheral.py.
Then you can use the e-puck2-android-ble app you can find in chapter Connecting to the BLE in order to connect to the Pi-puck extension via BLE. Once connected you'll receive some dummy data for the proximity values and by clicking on the motion buttons you'll see the related action printed on the Pi-puck side. This is a starting point that you can extend based on your needs.
5 Operating system
The system is based on Raspbian Stretch and can be downloaded from the following link pi-puck-os_16.12.19.zip.
When booting the first time, the first thing to do is expanding the file system in order to use all the available space on the micro sd:
1. sudo raspi-config
2. Select Advanced Options and then Expand Filesystem
3. reboot
5.1 e-puck2 camera configuration
The e-puck2 camera need to be configured through I2C before it can be used. For this reason a Python script is called at boot that detects and configures the camera. The script resides in the Pi-puck repository installed in the system (/home/pi/Pi-puck/camera-configuration.py), so beware to not remove it.
If the robot is plugged after the boot process is completed, you need to call manually the Python configuration script before using the camera by issueing the command python3 /home/pi/Pi-puck/camera-configuration.py.
In order to automatically run the script at boot, the /etc/rc.local was modified by adding the call to the script just before the end of the file.
5.2 Power button handling
The power button press is handled by a background service (systemd) started automatically at boot. The service description file is located in /etc/systemd/system/power_handling.service and it calls the /home/pi/power-handling/ program. Beware to not remove neither of these files.
The source code of the power button handling program is available in the Pi-puck repository and is located in /home/pi/Pi-puck/power-handling/power-handling.c.
5.3 Desktop mode
The system starts in console mode, to switch to desktop (LXDE) mode issue the command startx.
5.3.1 Camera viewer
A camera viewer called luvcview is installed in the system. You can open a terminal and issue simply the command luvcview to see the image coming from the robot camera.
5.4 VNC
VNC is a remote control desktop application that lets you connect to the Pi-puck from your computer and then you will see the desktop of the Pi-puck inside a window on your computer. You'll be able to control it as though you were working on the Pi-puck itself.
VNC is installed in the system and the VNC server is automatically started at boot, thus you can connect with VNC Viewer from your computer by knowing the IP address of the Pi-puck (refer to section How to know your IP address).
Notice that the VNC server is started also in console mode.
5.5 I2C communication
The communication between the Pi-puck extension and the robot is based on I2C. The system is configured to exploit the I2C hardware peripheral in order to save CPU usage, but if you need to use the software I2C you can enable it by modifying the /boot/config.txt file and removing the # symbol (comment) in front of the line with the text dtparam=soft_i2c (it is placed towards the end of the file).
5.6 Audio output configuration
You can enable or disable audio output by modifying the config.txt file in the boot partition.
To enable audio output insert the line: gpio=22=op,dh
To disable audio output insert the line: gpio=22=op,dl
If you don't need to play audio files it is suggested to disable audio output in order to save power.
6 ROS
ROS Kinetic is integrated in the Pi-puck system.
A ROS node developed to run in the Pi-puck is available for both CPP and Python, the communication system is based on the third architecture shown in chapter Wireless remote control; a more detailed schema is shown below:
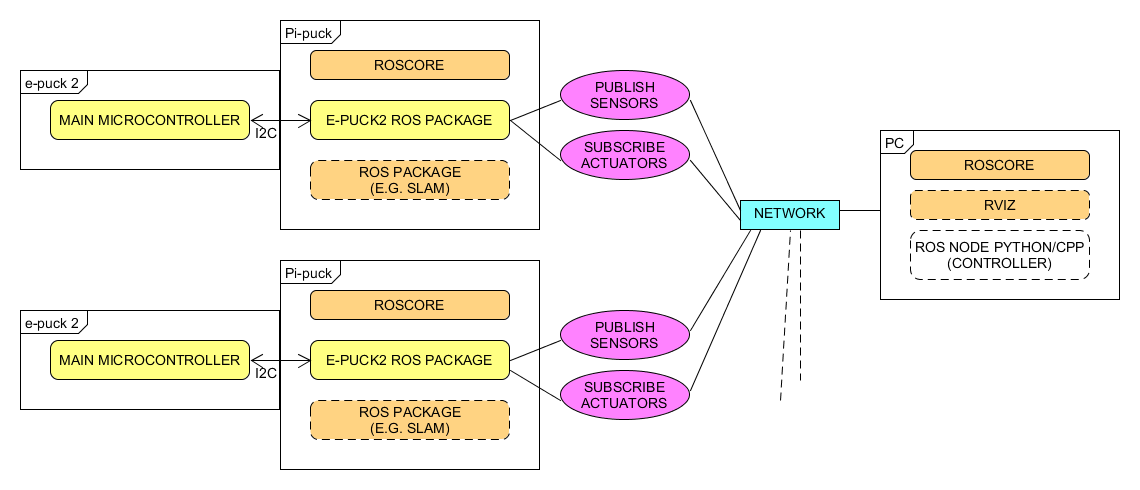
6.1 Initial configuration
The ROS workspace is located in ~/rosbots_catkin_ws/
The e-puck2 ROS driver is located in ~/rosbots_catkin_ws/src/epuck_driver_cpp/
Remember to follow the steps in the section Requirements and section Demos and scripts update, only once.
The PC (if used) and the Pi-puck extension are supposed to be configured in the same network.
6.2 Running roscore
roscore can be launched either from the PC or directly from the Pi-puck.
Before starting roscore, open a terminal and issue the following commands:
where roscore-ip is the IP of the machine that runs roscore
Then start roscore by issueing roscore.
6.3 Running the ROS node
Before starting the e-puck2 ROS node on the Pi-puck, issue the following commands:
where pipuck-ip is the IP of the Pi-puck extension and roscore-ip is the IP of the machine that runs roscore (can be the same IP if roscore runs directly on the Pi-puck).
To start the e-puck2 ROS node issue the command:
roslaunch epuck_driver_cpp epuck_minimal.launch debug_en:=true ros_rate:=20
The following graph shows all the topics published by the e-puck2 driver node:
 Click to enlarge
Click to enlarge
6.4 Get the source code
The last version of the e-puck2 ROS node can be downloaded from the git: git clone -b pi-puck https://github.com/gctronic/epuck_driver_cpp.git
To update to the last version follow these steps:
cd ~/rosbots_catkin_ws/src/rm -R -f epuck_driver_cppgit clone -b pi-puck https://github.com/gctronic/epuck_driver_cpp.gitcd ~/rosbots_catkin_ws/catkin_make --pkg epuck_driver_cpp
6.5 Python version
A Python version developed by the York University can be found here https://github.com/yorkrobotlab/pi-puck-ros.
7 OpenCV
OpenCV 3.4.1 is integrated in the Pi-puck system.
8 York Robotics Lab Expansion Board
The York Robotics Lab developed an expansion board for the Pi-puck extension that includes: 9-DoF IMU, 5-input navigation switch, RGB LED, XBee socket, 24-pin Raspberry Pi compatible header. For more information have a look at https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/.
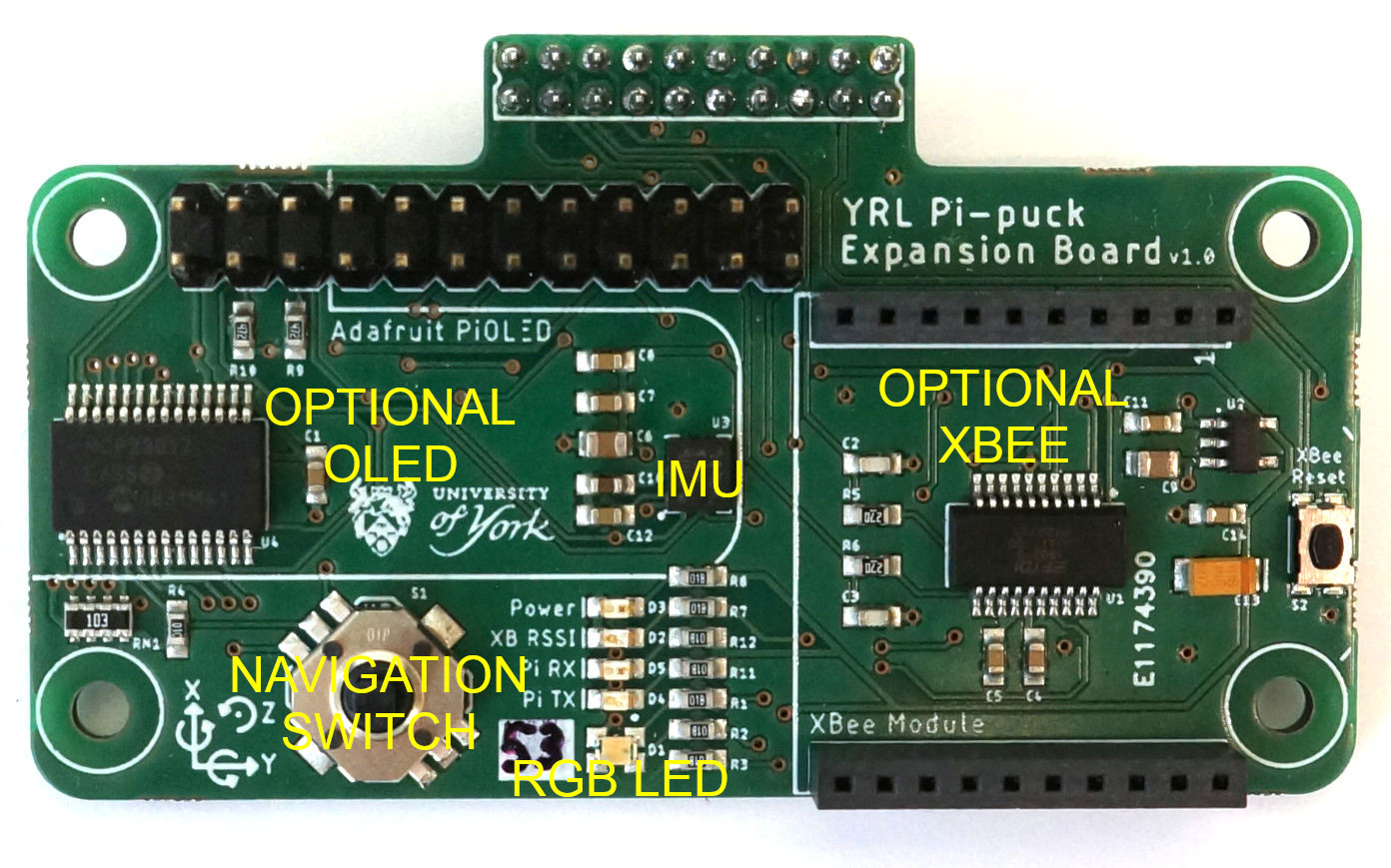
An example showing how to communicate with the YRL expansion board is available in the Pi-puck repository of the York Robotics Lab:
git clone https://github.com/yorkrobotlab/pi-puck.git pi-puck_yrlcd pi-puck_yrl/python-librarypython3 pipuck-library-test.py -x Once started, press in sequence up, down, left, right, center to continue the demo.
8.1 Assembly
The assembly is very simple: place the YRL expansion board on top of the Raspberry Pi and then connect them with the provided screws. Once they are connected, you can attach both on top of the Pi-puck extension.
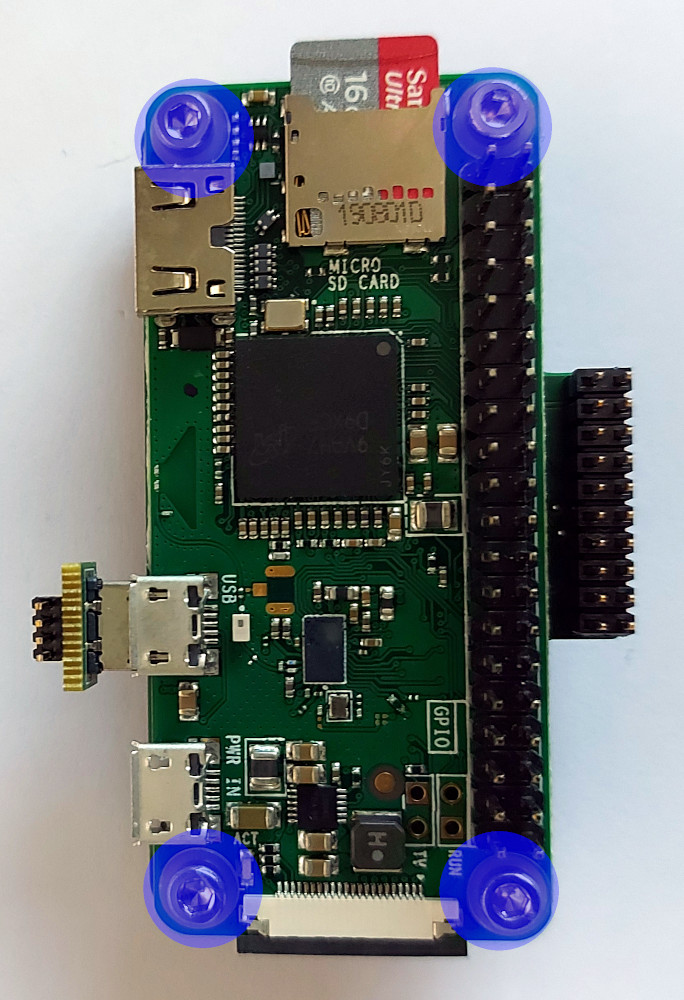
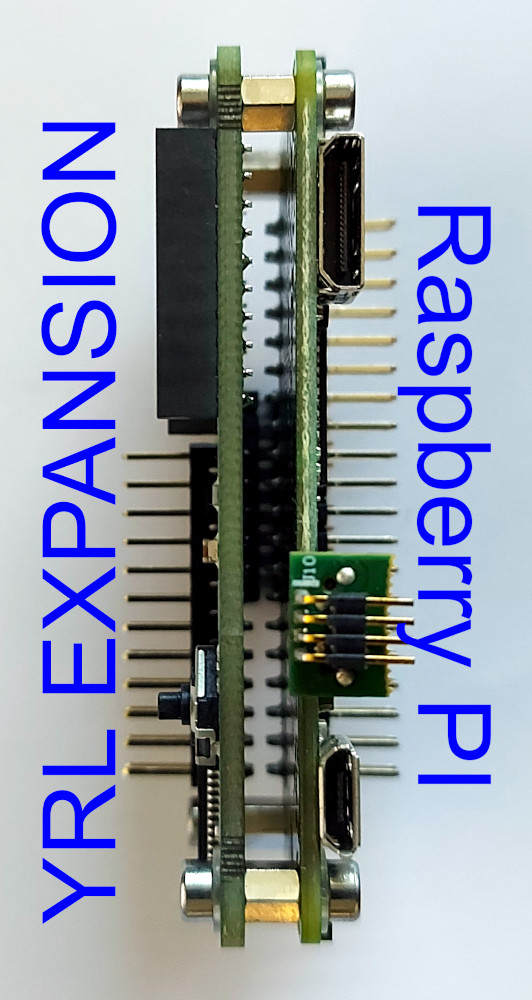

8.2 XBee
In this section it is explained how to send data from the Pi-puck to the computer using XBee modules Series 1.
The XBee module mounted on the YRL expansion must be programmed with the XBEE 802.15.4-USB ADAPTER firmware; this can be done with the XTCU software. With XTCU be sure to program also the same parameters on both modules in order to be able to communicate between each other: Channel (e.g. C), PAN ID (e.g. 3332), DH = 0, DL = 0, MY = 0.
Some Python examples ara available in the YRL Expansion Board GitHub repository that can be used to communicate with the XBee module mounted on the YRL expansion. These examples are based on the Digi XBee Python library that can be installed with the command pip3 install digi-xbee. This library requires the XBee module to be configured in API mode; you can setup this mode following these steps:
git clone https://github.com/yorkrobotlab/pi-puck-expansion-board.gitcd pi-puck-expansion-board/xbeepython3 xbee-enable-api-mode.py
Now connect the second module to the computer and run XTCU, select the console view and open the serial connection. Then run the xbee-send-broadcast.py example from the Pi-puck by issuing the command: python3 xbee-send-broadcast.py. From the XTCU console you should receive Hello Xbee World!.
For more information refer to https://pi-puck.readthedocs.io/en/latest/extensions/yrl-expansion/xbee/.
9 Time-of-Flight Distance Sensor add-on
The Pi-puck extension integrates six sensor board sockets that can be used to add up to six VL53L1X-based distance sensor add-ons. The Pi-puck equipped with these add-ons is shown in the following figure:
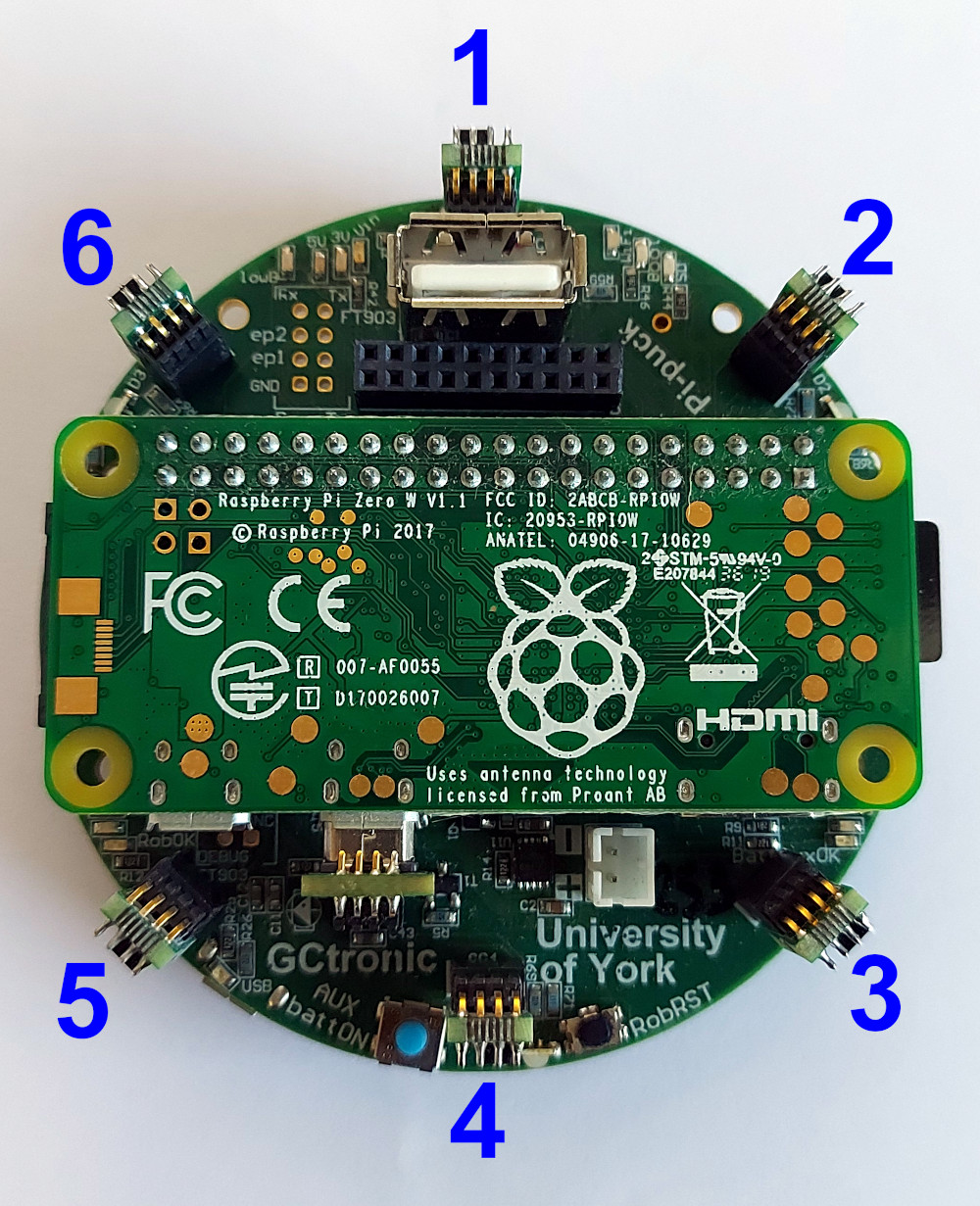
For more information have a look at https://pi-puck.readthedocs.io/en/latest/extensions/tof-sensor/#time-of-flight-distance-sensor.
Beware that once the socket for the ToF add-on sensor 3 is soldered on the pi-puck extension, you are no more able to connect the HDMI cable.
9.1 Communicate with the ToF sensors
In order to communicate with the sensors you can use the multiple-i2c-bus-support branch of the vl53l1x-python library from Pimoroni. To install this library follow these steps:
git clone -b multiple-i2c-bus-support https://github.com/pimoroni/vl53l1x-python.gitcd vl53l1x-pythonsudo python3 setup.py install
A Python example showing how to read data from the ToF sensors is available in the Pi-puck repository of the York Robotics Lab:
git clone https://github.com/yorkrobotlab/pi-puck.git pi-puck_yrlcd pi-puck_yrl/python-librarypython3 pipuck-library-test.py -t
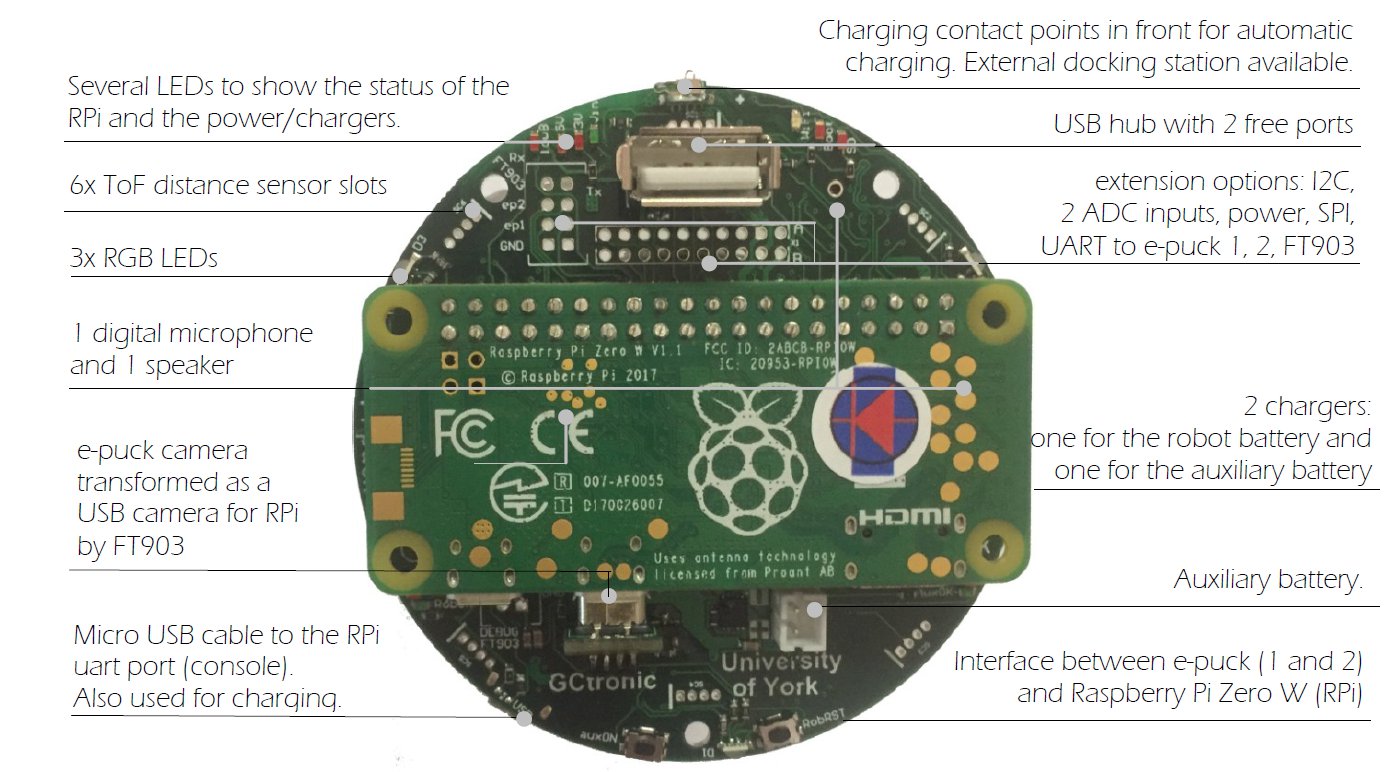
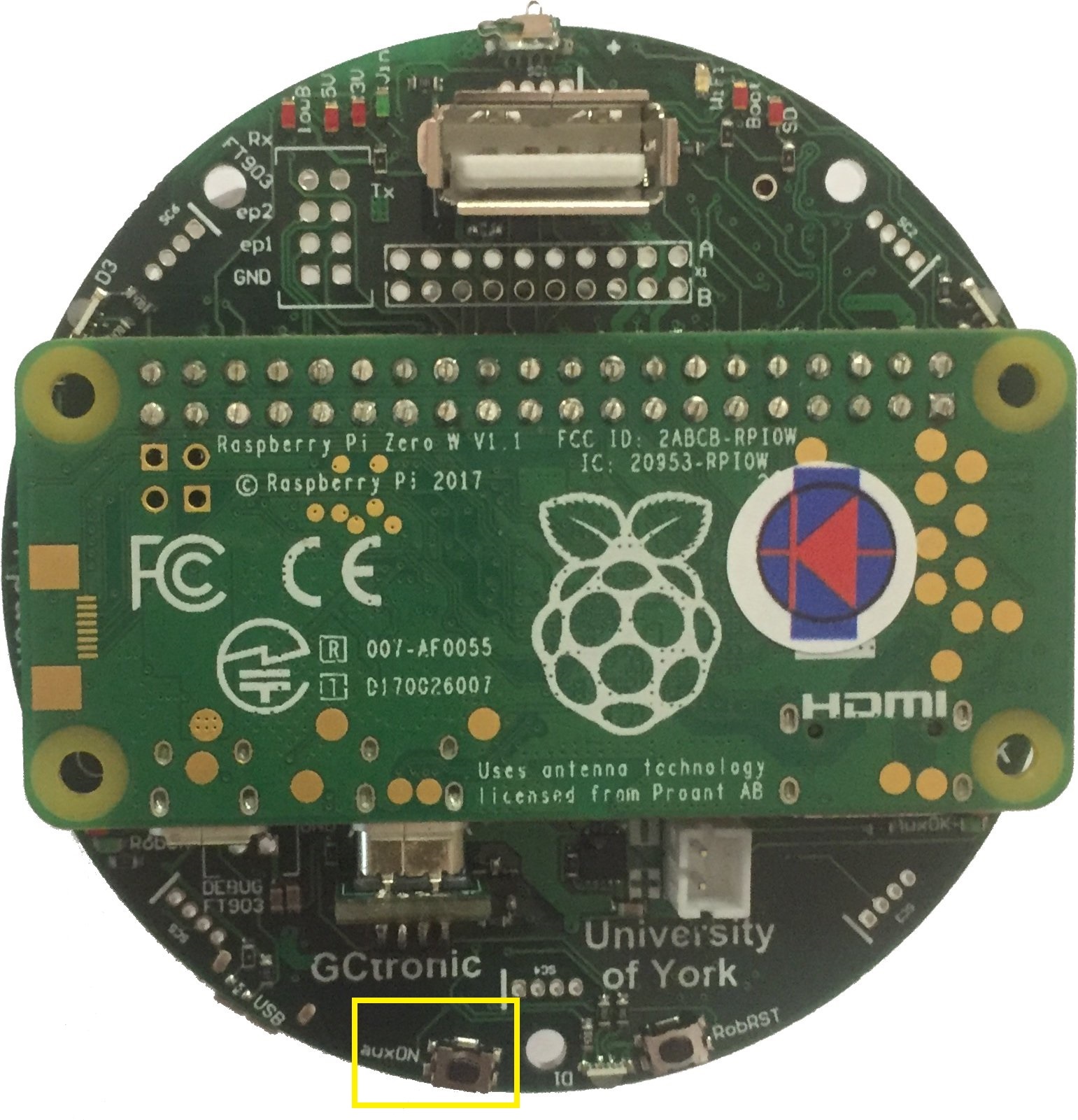
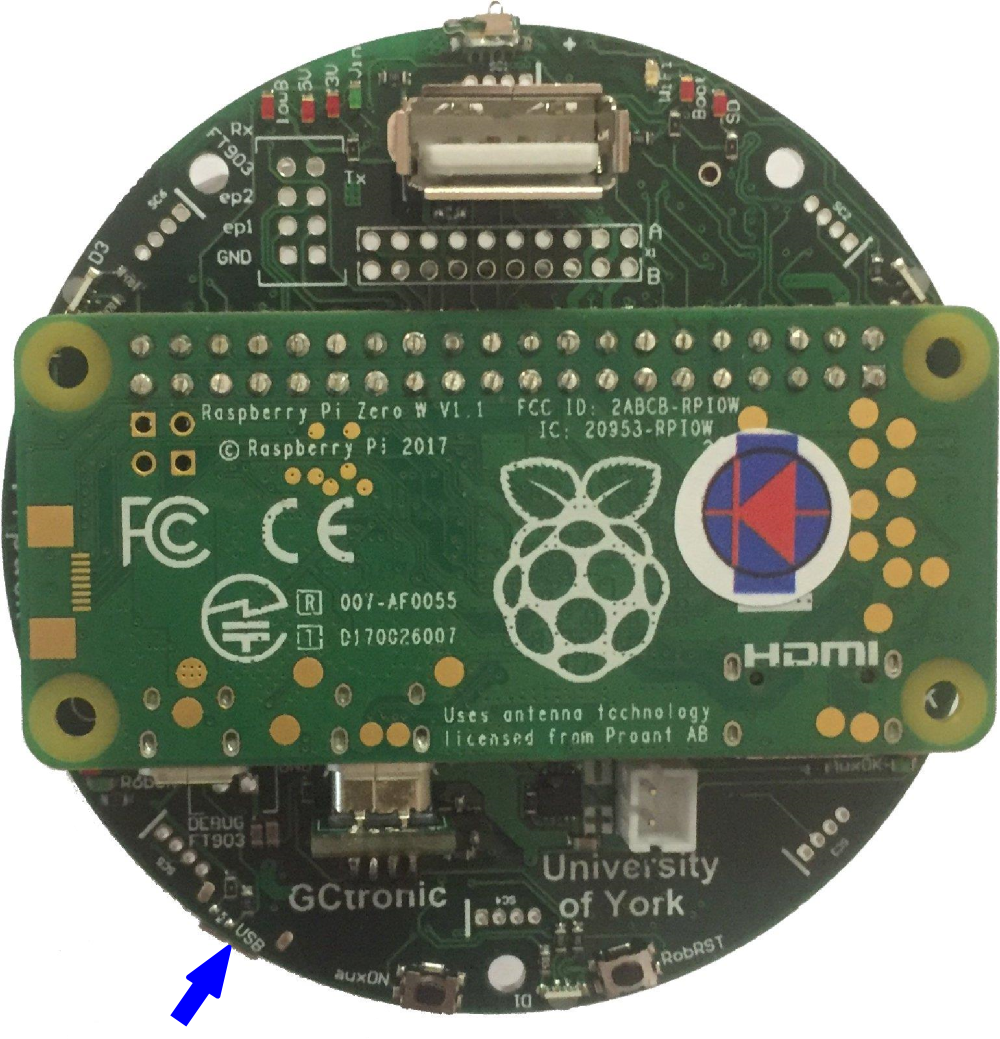
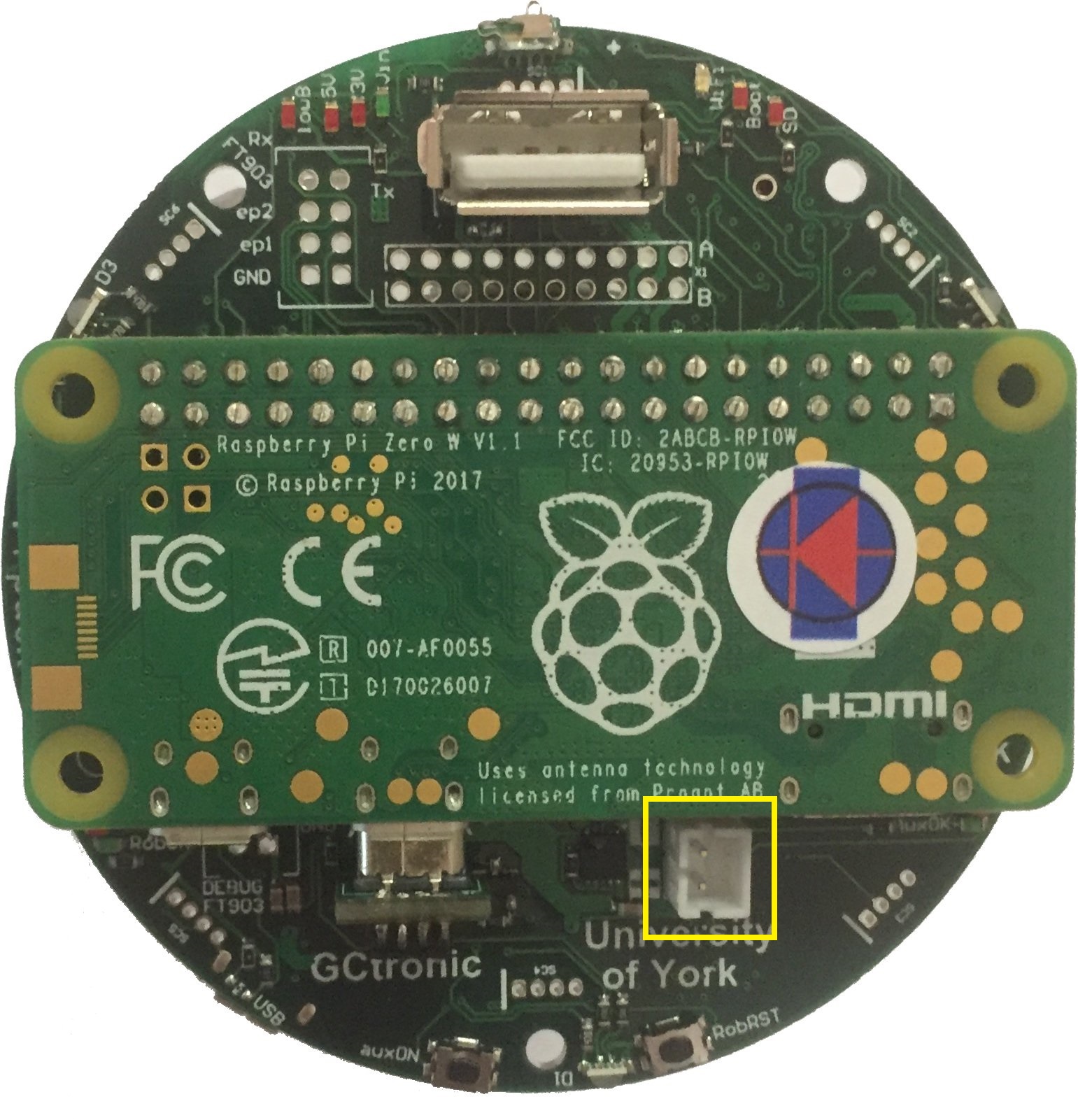
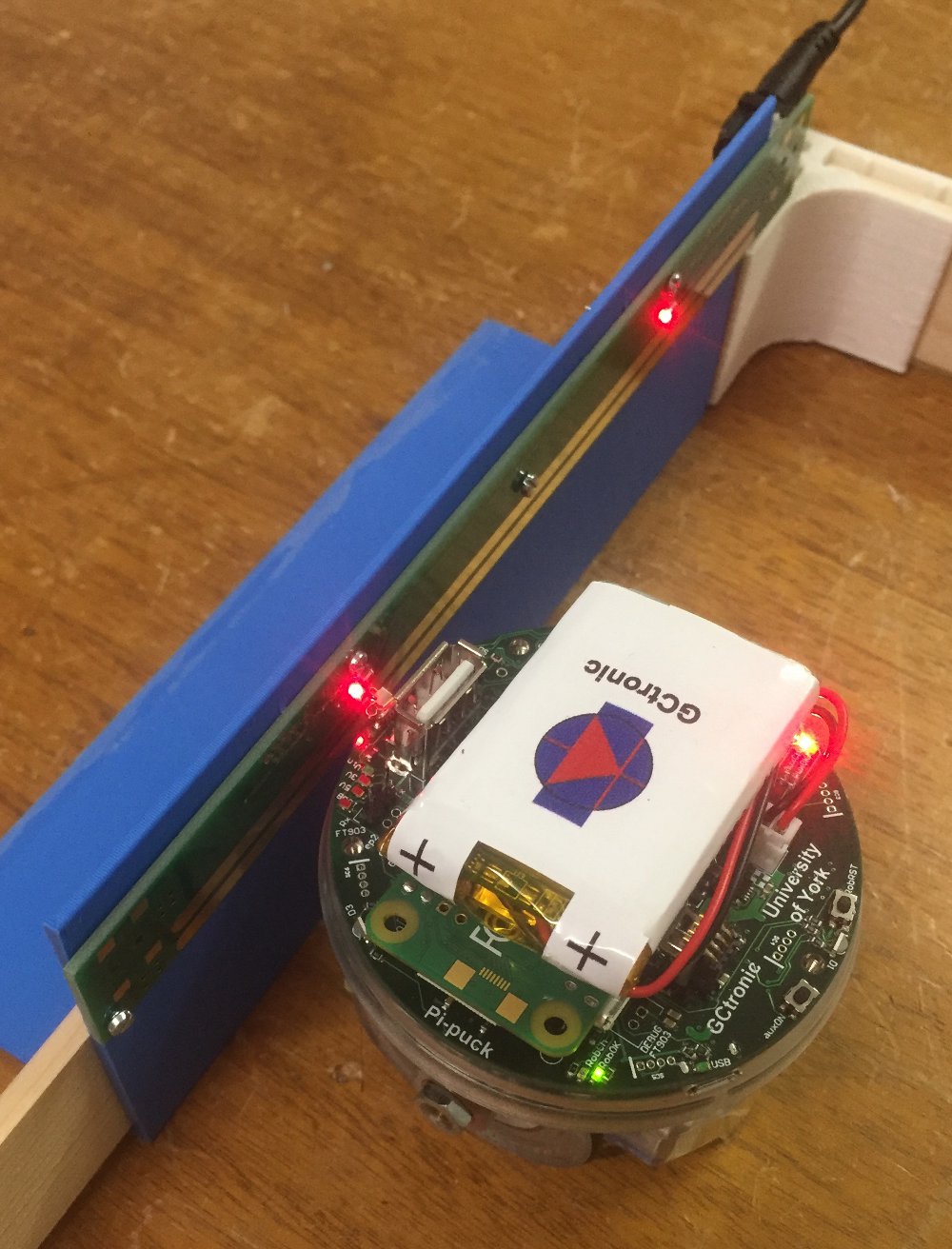
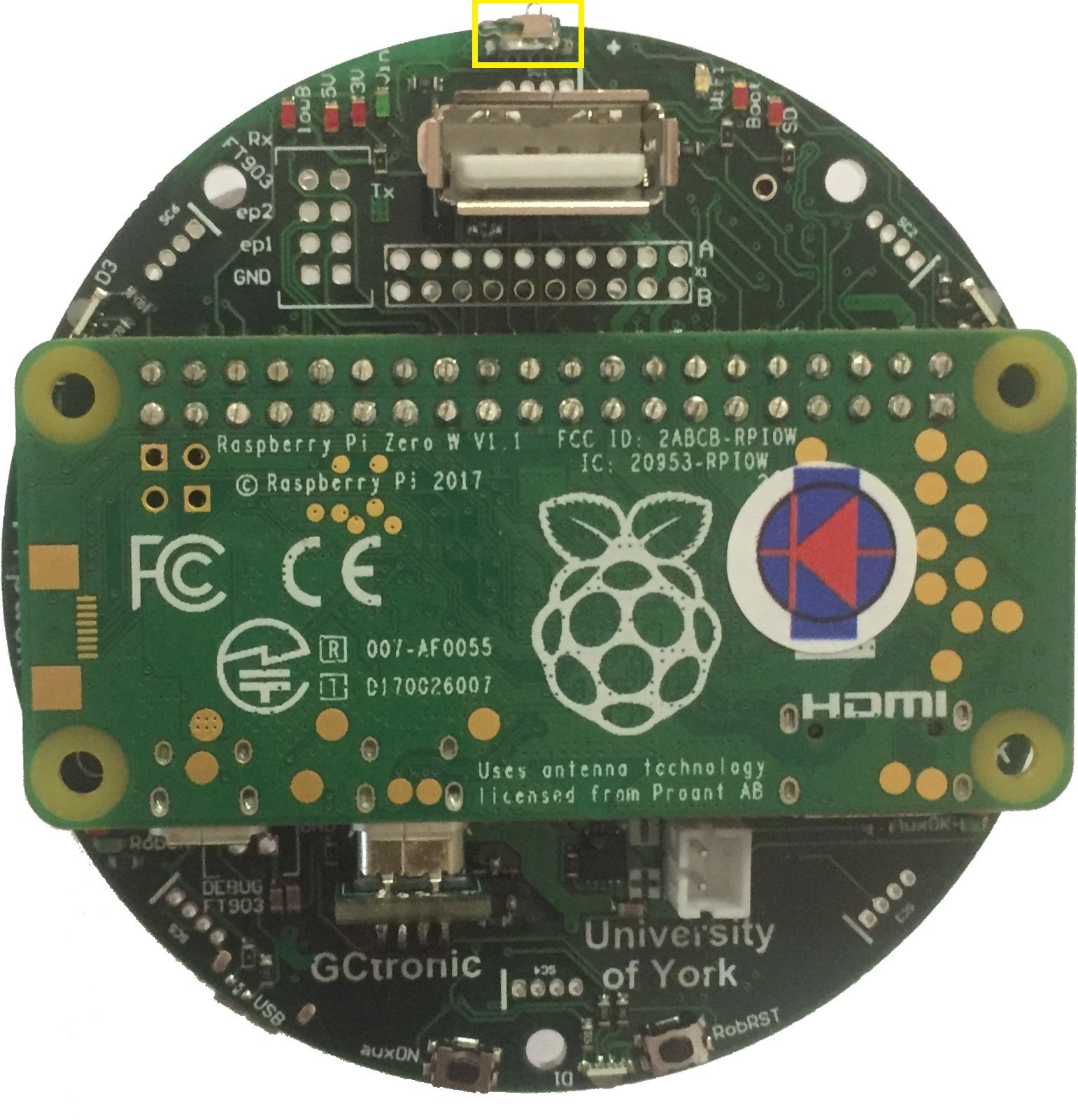
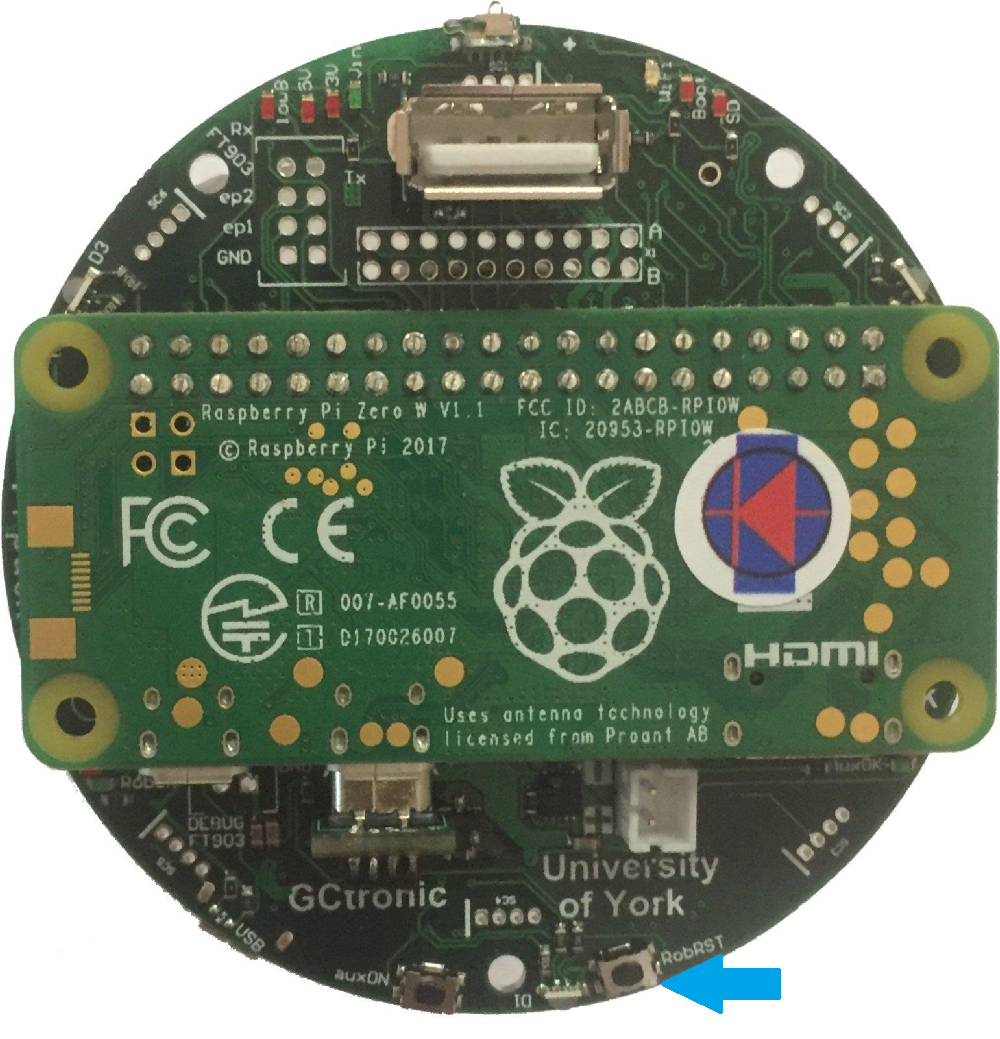
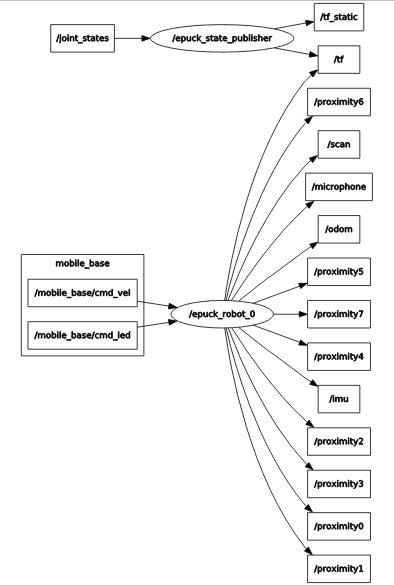 Click to enlarge
Click to enlarge